

Giới thiệu cấu trúc tổng thể của xe tự lái Talos
Vào tháng 11 năm 2007 cơ quan nghiên cứu tiên tiến quốc phòng Mỹ DARPA đã tiến hành tổ chức cuộc thi cuộc thi Thách thức đô thị UCE-DARPA, đó là lần thứ 3 trong một loạt các cuộc thi nhằm thúc đẩy nghiên cứu và phát triển phương tiện tự lái cho lực lượng quốc phòng. Cuộc thi thách thức đô thị UCE giới thiệu một kịch bản giao thông đô thị vào trong cuộc thi. Mục tiêu ngắn hạn của cuộc thi nhằm phát triển một chiếc xe tự lái có khả năng vượt qua được đợt kiểm tra của bang California. Xe Talos là sản phẩm của nhóm nghiên cứu MIT phát triển trên chiếc xe nguyên mẫu Land Rover LR3 tham gia cuộc thi thách thức đô thị UCE. Trong bài viết này tác giả giới thiệu về cấu trúc tổng thể của hệ thống xe Talos.
Cấu trúc tổng thể của hệ thống (Hình 1) bao gồm các hệ thống phụ sau:
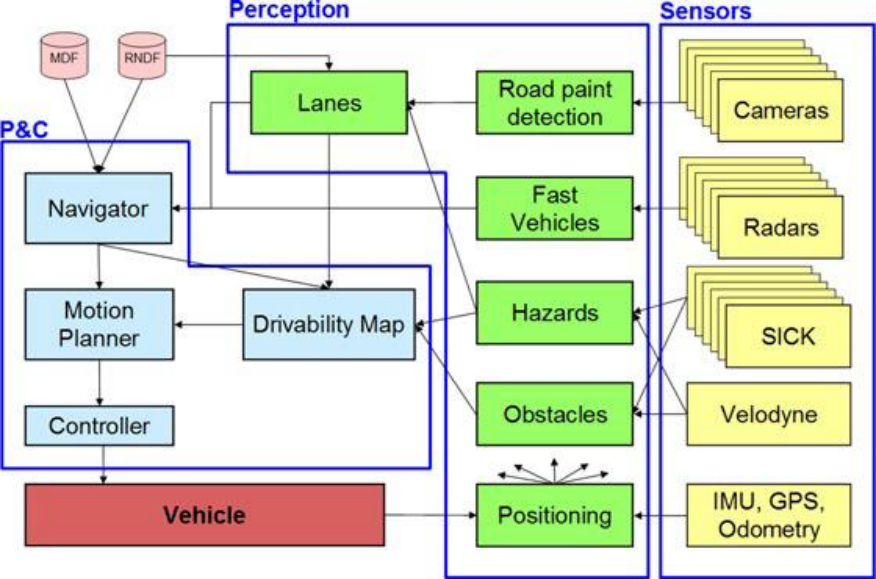
Hình 1. Cấu trúc hệ thống trên xe tự lái Talos.
- Máy dò vết sơn làn đường sử dụng hai kỹ thuật xử lý hình ảnh khác nhau, phù hợp với các đường cong để đánh dấu làn đường từ dữ liệu của camera thu được.
- Máy theo dõi làn đường điều hòa dữ liệu từ bản đồ RNDF với các tuyến đường được nhận biết bằng cảm biến tầm nhìn và LIDAR để xác định vị trí của chiếc xe trên mạng lưới đường giao thông.
- Máy dò chướng ngại vật sử dụng SICK và Velodyne LIDAR để xác định chướng ngại vật di chuyển và chướng ngại vật cố định.
- Máy dò vùng trũng nguy hiểm (ổ gà, ổ voi…) sử dụng dữ liệu từ LIDAR nhằm phát hiện và hạn chế nguy hiểm.
- Máy dò tốc độ xe sử dụng sóng rada millimeter để xác định xe gần kề nằm trong cự ly trung bình hay cự ly xa.
- Các mô đun định vị, ước tính vị trí chiếc xe trong hai hệ quy chiếu. Khung cục bộ được kết hợp giữa việc sử dụng dữ liệu từ các cảm biến chuyển động (odometry) với cảm biến quán tính (IMU) để ước tính chuyển động 3 chiều (egomotion) của xe thông qua môi trường cục bộ của xe. Tọa độ toàn cầu ước tính chuyển đổi sự tương ứng giữa khung cục bộ và phối hợp với khung GPS, mất tín hiệu GPS và lệch cảm biến chuyển động sẽ làm thay đổi sự chuyển đổi này. Hầu hết các mô đun tuân theo mô đun định vị để điều chỉnh không gian 3 chiều của xe hoặc hoạch định đường đi cho xe.
- Bộ điều hướng theo dõi trạng thái nhiệm vụ để phát triển một phương án cấp cao, thực hiện nhiệm vụ dựa trên RNDF và MDF. Tối ưu hóa thời gian để tạo ra một vị trí đích ngắn hạn cung cấp cho các kế hoạch di chuyển.
Bản đồ khả năng lái cung cấp một phương thức giao tiếp hiệu quả để nhận tín hiệu từ cảm biến và xử lý, lập kế hoạch chuyển động phù hợp với đường đi. Bản đồ khả năng lái được xây dựng dựa trên việc sử dụng dữ liệu nhận thức, được lọc bởi các ràng buộc hiện thời theo quy định của bộ điều hướng.
- Xác định các kế hoạch chuyển động sau đó tối ưu hóa, một quỹ đạo xe khả thi là di chuyển về phía điểm mục tiêu được lựa chọn bởi bộ điều hướng, bằng cách sử dụng ràng buộc được đưa ra bởi nhận biết tình huống đã được cài đặt vào bản đồ khả năng lái. Sự bất ổn trong nhận biết tình huống được xử lý thông qua việc quy hoạch lại nhanh chóng và thắt chặt những hạn chế.
- Kế hoạch chuyển động của xe góp phần làm tăng sự an toàn của xe, ngay cả khi gặp phải chướng ngại vật đang di chuyển. Kết quả là quỹ đạo của chiếc xe đạt như mong muốn, quy định một danh sách có thứ tự các cột mốc (vị trí, vận tốc, mục tiêu) được cung cấp cho điều khiển chuyển động ở mức độ thấp.
- Bộ điều khiển thực hiện việc kiểm soát các chuyển động ở mức độ thấp để theo dõi đường đi mong muốn và đưa ra hồ sơ vận tốc chuyển động bởi kế hoạch chuyển động xe.
- Những mô đun này được hổ hỗ trợ bởi cấu trúc phần mềm rất mạnh mẽ và linh hoạt dựa trên hệ thống giao thức Ethernet mới, gọn nhẹ. Cấu trúc mới này tạo điều kiện giao tiếp hiệu quả giữa các mô đun phần mềm không đồng bộ hoạt động trên hệ thống phân phối máy tính của xe. Hệ thống này cho phép tạo ra nhanh chóng một cơ sở mật mã quan trọng, hiện có khoảng 140.000 mã nguồn, kết hợp các khả năng tinh vi, chẳng hạn như ghi dữ liệu, phát lại, trực quan 3 chiều dữ liệu thử nghiệm.
Những tin mới hơn
Những tin cũ hơn
- Chính sách bảo đảm chất lượng giai đoạn 2025 –...
- Triết lý giáo dục, sứ mạng, tầm nhìn và giá trị...
- Khoa Ô tô – địa chỉ đào tạo uy tín, chất lượng
- Triết lý giáo dục Trường Đại học Sao Đỏ
- Tham gia vòng chung kết cuộc thi sáng tạo Robocon...
- 068/QĐ-ĐHSĐ - QĐ vv hỗ trợ chi phí học tập cho SV...
- Kế hoạch Tổ chức các hoạt động chào mừng ngày Nhà...
- Tuyển sinh viên học lớp Kỹ thuật viên Toyota khóa...
- Đội OTOSDU01 và đội SAODOHD2 trường đại học Sao Đỏ...
- Bộ Giáo dục và đào tạo công bố quy chế tuyển sinh...
- Đang truy cập60
- Hôm nay
- Tháng hiện tại
- Tổng lượt truy cập