

Các phần mềm hỗ trợ trong hệ thống điều khiển xe chạy tự động
1. Phần mềm bản đồ 3D
Một phần mềm khác được tính toán để tạo ra một bản đồ 3D sử dụng công nghệ OpenGL, sau đó sử dụng nó để sữa lỗi và giao tiếp với dữ liệu 3D từ Lidar. Phần mềm cũng kết nối với phần mềm giám sát và nhận thêm hướng dẫn từ nó. Khi Lidar chưa tiếp nhận đầy đủ thông tin, ta có thể thấy một bản đồ 3D ngẫu nhiên bằng cách sử dụng dữ liệu 3D ngẫu nhiên như hình 1 Trong hình, một chấm là một chướng ngại vật 3D có khoảng cách X. Khoảng cách của chướng ngại vật được mô tả bởi màu của nó. Từ khi chiếc xe di chuyển, ta phải tính vị trí mới nhất vào mỗi 1/20s. Vị trí của xe được tính với dữ liệu thực tế lấy được từ máy đo gia tốc, nó không hiển thị trong sơ đồ. Dữ liệu phải được tính toán lại thông qua điều chỉnh, để chuyển động của chiếc xe không ảnh hưởng bởi khoảng cách của các chướng ngại.
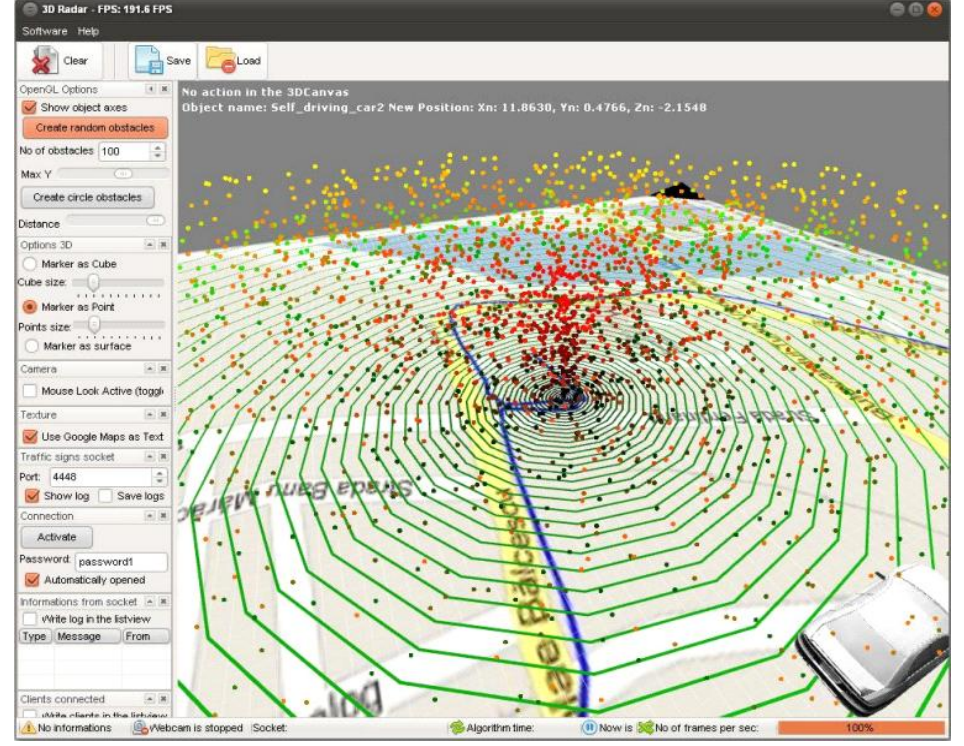
Hình 1. Đây là giao diện phần mềm và không gian được tạo ra.
Màu của các đối tượng được chọn để mô tả khoảng cách giữa xe và đối tượng. Dữ liệu được tạo ra ngẫu nhiên. Có khoảng 180 điểm trên đường tròn.
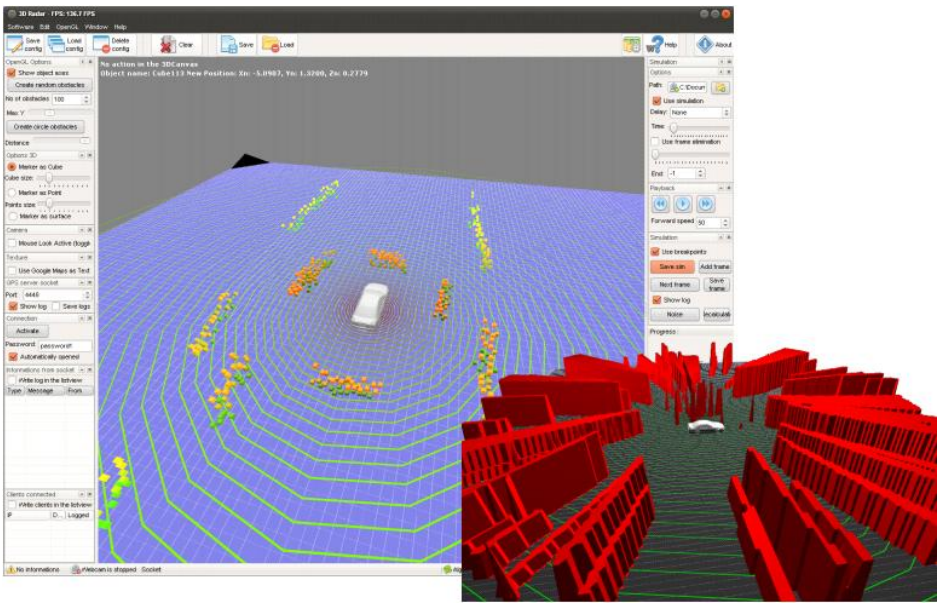
Hình 2. Trong hình trên là giao diện phần mềm và không gian được tạo ra bởi phần mềm sử dụng OpenGL.
Màu của các đối tượng được chọn để mô tả khoảng cách giữa xe và đối tượng. Dữ liệu được tạo ngẫu nhiên.
2 Phần mềm GPS
Đôi khi không thể phát hiện chính xác các biển báo giao thông vì bị các chướng ngại vật che khuất. Để tránh điều này và tăng khả năng nhận dạng biển báo, tất cả các xe tự lái phối hợp để tạo ra một dữ liệu cơ sở chung với tất cả các biển báo và vị trí GPS của chúng. Khi xe sử dụng dữ liệu cơ sở này, phần mềm GPS sẽ cập nhật dữ liệu cơ sở có biển báo mới và phần mềm giám sát sẽ nhận biển báo giao thông lưu trữ từ vị trí GPS đó. Biển báo giao thông từ dữ liệu cở sở chung có một đặc điểm rất quan trọng là phản hồi. Phản hồi là cho phép tạo ra khả năng chắc chắn cho việc lưu trữ biển báo trong dữ liệu cơ sở chung. Thông tin liên lạc giữa phần mềm giám sát, biển báo giao thông và phần mềm GPS được thực hiện bằng cách sử dụng các giao thức được xây dựng bởi chính nó.
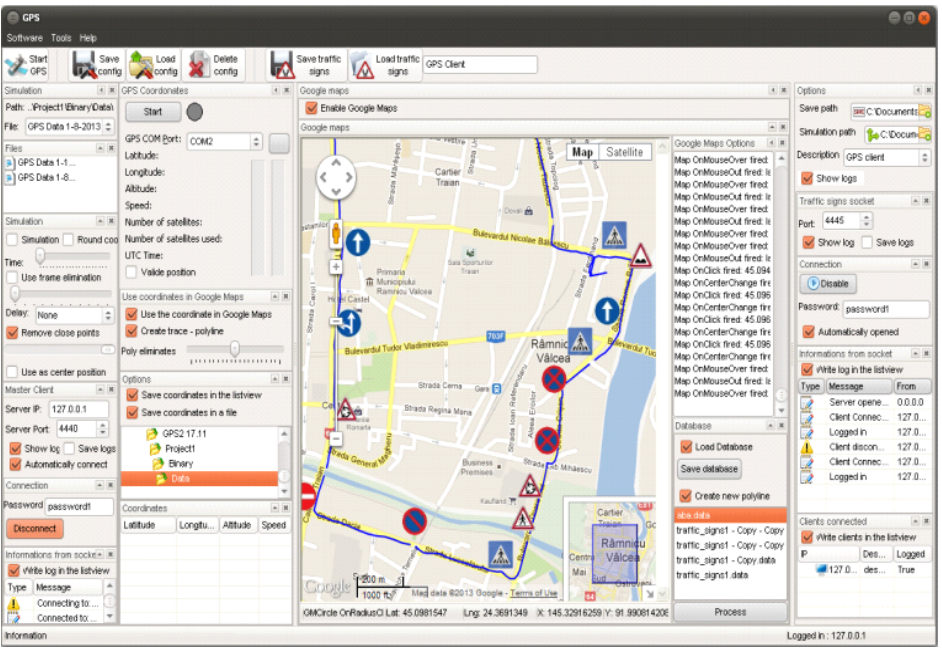
Hình 3. Trong hình trên là phần mềm GPS.
Đường màu xanh lam là con đường chiếc xe sẽ đi. Biển báo giao thông được nhận dạng trong thực tế bởi phần mềm và dữ liệu cơ sở chung đang được lưu.
3. Phần mềm nhận dạng biển báo
Như một người lái xe, chiếc xe tự động cũng phải quen thuộc với tất cả các biển báo giao thông. Phần mềm nhận dạng biển báo giao thông hoạt động dựa trên hệ thống lọc màu quang phổ HSV, mạng lưới nơ-ron đa lớp, dữ liệu cơ sở sử dụng tọa độ GPS và bản đồ Google.
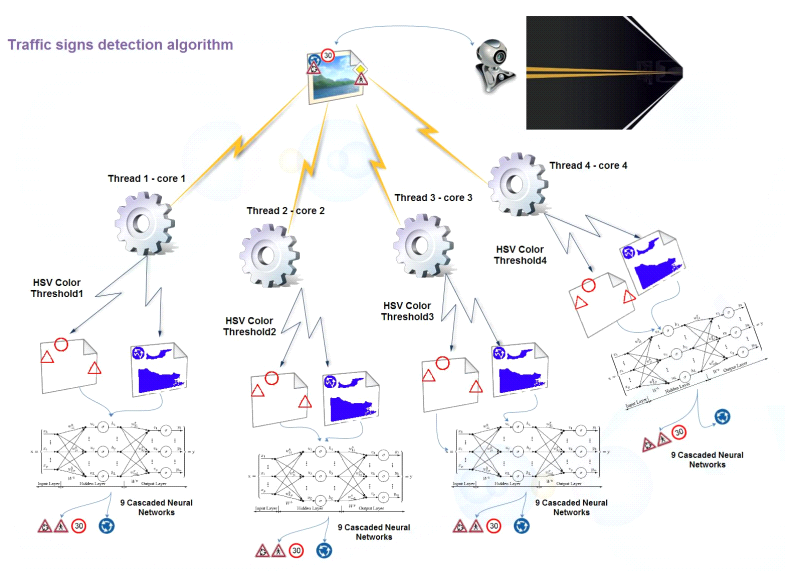
Hình 4. Sơ đồ này minh họa cách thuật toán phát hiện tín hiệu có thể nhận dạng biển báo từ hình ảnh đơn giản.
Nó được sử dụng giải pháp đa ngưỡng. Mỗi ảnh được thực hiện bằng cách cho mỗi core CPU sử dụng một ngưỡng HSV khác nhau. Các thuật toán chạy song song và được phát triển sử dụng một mô phỏng đa ngưỡng. Phần mềm tạo ra một ngưỡng cho mỗi core. Hình ảnh được chụp từ Camera người lái sẽ được chèn trong một hàng đồng bộ. Mỗi core CPU sau khi hoàn thành nhiệm vụ cuối cùng, nó sẽ xác minh lại liệu có bất kì dấu hiệu gì trong hàng đồng bộ đó không. Nếu có, nó sẽ đưa ra một nhiệm vụ mới từ hàng đó.
4. Phát hiện và theo dõi nhiều phương tiện sử dụng bộ lọc
Một hệ thống quan sát thực tế được phát triển, có thể phân tích video màu được lấy từ camera đặt tại vị trí người lái. Hệ thống sử dụng một ô hình chữ nhật có màu sắc và thông tin di chuyển để nhận dạng và theo dõi các phương tiện trên đường. Thuật toán dựa trên bộ lọc hạt.
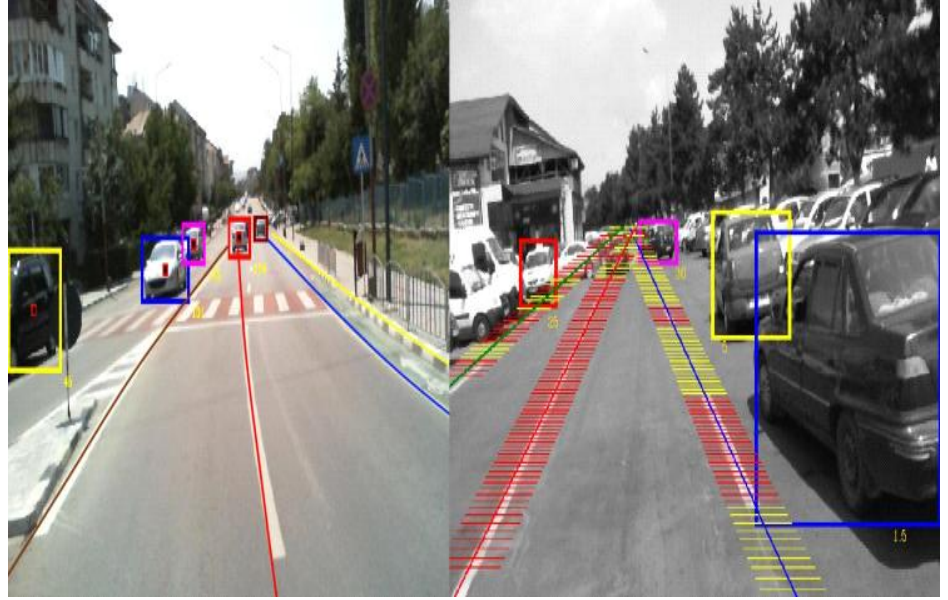
Hình 5. Phần mềm sử dụng các ô hình chữ nhật để nhận dạng xe.
Nguyên tắc của thuật toán dựa trên một biểu đồ. Trong lí thuyết xử lí ảnh, biểu đồ hình ảnh liên quan đến biểu đồ tần suất giá trị cường độ điểm ảnh. Biểu đồ tần suất là một đồ thị hiển thị tất cả các điểm ảnh của một hình ảnh ở mỗi giá trị cường độ khác nhau được tìm thấy trong hình.
Những tin mới hơn
Những tin cũ hơn
- Chính sách bảo đảm chất lượng giai đoạn 2025 –...
- Triết lý giáo dục, sứ mạng, tầm nhìn và giá trị...
- Khoa Ô tô – địa chỉ đào tạo uy tín, chất lượng
- Triết lý giáo dục Trường Đại học Sao Đỏ
- Tham gia vòng chung kết cuộc thi sáng tạo Robocon...
- 068/QĐ-ĐHSĐ - QĐ vv hỗ trợ chi phí học tập cho SV...
- Kế hoạch Tổ chức các hoạt động chào mừng ngày Nhà...
- Tuyển sinh viên học lớp Kỹ thuật viên Toyota khóa...
- Đội OTOSDU01 và đội SAODOHD2 trường đại học Sao Đỏ...
- Bộ Giáo dục và đào tạo công bố quy chế tuyển sinh...
- Đang truy cập71
- Hôm nay
- Tháng hiện tại
- Tổng lượt truy cập