

CÁC THIẾT BỊ HỖ TRỢ CƠ BẢN ĐIỀU KHIỂN XE CHẠY TỰ ĐỘNG
Ngày nay xe chạy tự động là một trong những hướng phát triển tương lai của xe ô tô trên thế giới. Giúp người đọc có thể hiểu rõ hơn về phương tiện này, trong bài viết tác giả giới thiệu các thiệt bị hỗ trợ cơ bản cho xe chạy tự động.
1. Lidar
Lidar là thiết bị quan trọng nhất trong các phương tiện tự lái, được gắn trên nóc của xe. Lidar bao gồm một bộ phát, bộ thu và gương phản chiếu. Bộ phát sẽ phát ra một chùm tia Laser đến tấm gương phản chiếu quay cùng với giá đỡ hình trụ (10 vòng/phút). Các chùm tia này sau khi qua gương sẽ đập vào các đối tượng xung quanh và phản chiếu trở về gương và đi vào bộ thu. Bộ thu sẽ phân tích các dữ liệu nhận được. Từ đó, chiếc xe có thể tạo ra bản đồ khu vực xung quanh và sử dụng nó để tránh các đối tượng cũng như chướng ngại vật.
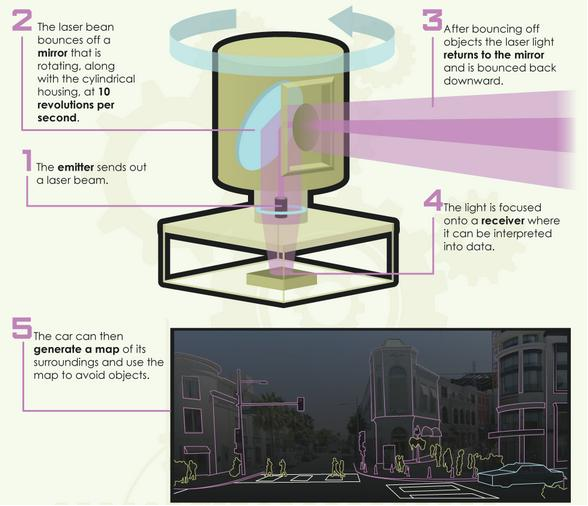
Hình 1. Cấu tạo và hoạt động của Lidar
2. Cảm biến hình ảnh quang học
Bộ cảm biến hình ảnh quang học có nhiệm vụ chuyển đổi tín hiệu ánh sáng thành tín hiệu điện. Trên xe ô tô các cảm biến này còn được sử dụng trong nhiều hệ thống khác bao gồm: hệ thống cảnh báo làn đường, hệ thống phát hiện tín hiệu biển báo, hỗ trợ đậu xe và tránh va chạm. Cảm biến quang học thường dựa trên một trong hai công nghệ CCD hoặc CMOS. Cả hai loại cảm biến đều thể hiện một loạt các yếu tố về hình ảnh.
3. Cảm biến khoảng cách Radar
Cảm biến Radar được trang bị trên xe để phát hiện khoảng cách giữa xe với các chướng ngại vật hoặc bất kỳ phương tiện nào đang lưu thông trên đường. Các cảm biến này sử dụng để kiểm soát hành trình và tránh va chạm.
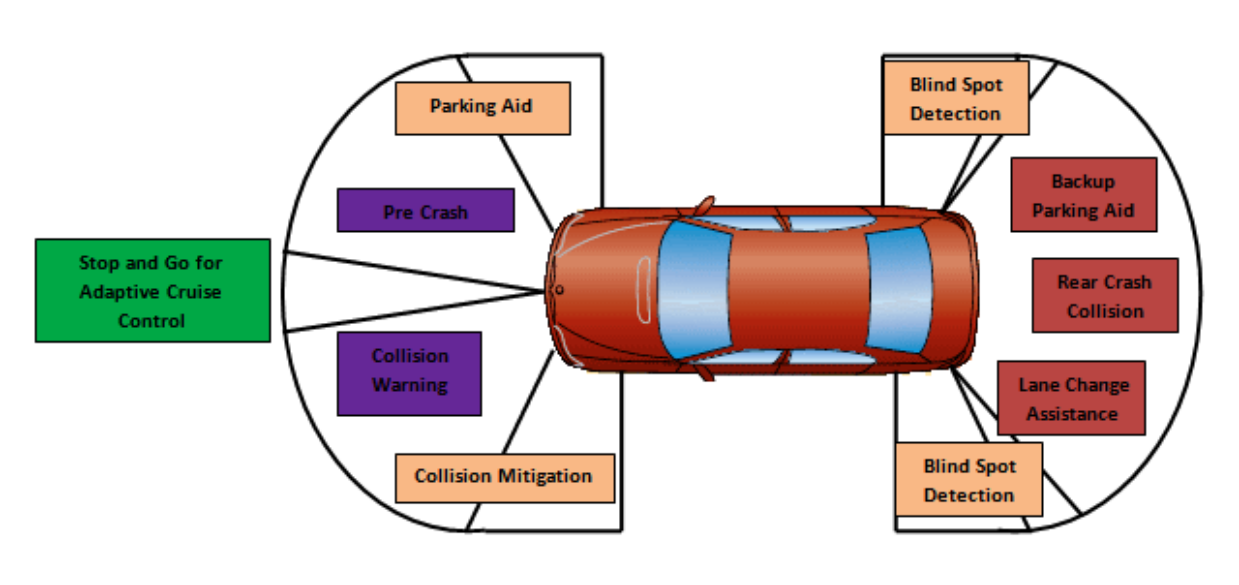
Hình 2. Ứng dụng trên xe có dùng cảm biến Radar.
Có hai phương pháp chính để đo khoảng cách khi sử dụng Radar. Phương pháp đầu tiên là phương pháp truyền trực tiếp, là phương pháp liên quan đến việc làm chậm khả
năng tiếp nhận tín hiệu hồi về, có thể tương quan với khoảng cách của đối tượng trả về như một chức năng của tốc độ ánh sáng và thời gian hay đúng hơn là thời gian trễ trong truyền và nhận sóng. Phương pháp thứ hai là phương pháp truyền gián tiếp hoặc tần số điều chỉnh sóng liên tục. Truyền gián tiếp là biến tần số được gửi đi và nhận về để tạo sự khác biệt trong tần số. Có thể sử dụng nó để trực tiếp xác định khoảng cách cũng như tốc độ tương đối của các đối tượng. Cảm biến Radar được ứng dụng rất tốt trong việc phát hiện các đối tượng phát ra bức xạ điện từ (như vật bằng kim loại). Bởi vì nó hoạt động ở bước sóng vào khoảng vài mm, Radar cũng phát hiện khá tốt các đối tượng nhỏ chỉ vài cm hoặc lớn hơn.
4. Hệ thống định vị toàn cầu GPS
GPS có nhiệm vụ xác định vị trí, địa điểm cụ thể và xác định con đường tốt nhất để di chuyển. GPS sử dụng hệ tọa độ và bản đồ Google để xác định vị trí hiện tại của xe. GPS cũng có thể truy cập thông tin về tốc độ và hướng của xe, để điều chỉnh hướng xe trong những tình huống tắc nghẽn hoặc gặp sự cố.

Hình 3. Hệ thống định vị toàn cầu GPS
Vệ tinh GPS quay xung quanh trái đất hai lần mỗi ngày với một quỹ đạo rất chính xác và truyền tín hiệu về trái đất. Máy thu GPS nhận tín hiệu này và sử dụng để tính toán chính xác vị trí của xe. Về cơ bản, các máy thu GPS so sánh thời gian tín hiệu được truyền bởi một vệ tinh với thời gian mà nó nhận được. Bấy giờ với các phép đo khoảng cách từ mộtvài vệ tinh có thể xác định được vị trí của xe và hiển thị nó trên bản đồ điện tử.
Một máy thu GPS phải nhận tín hiệu của ít nhất ba vệ tinh để tính toán vị trí 2D (vĩ độ và kinh độ) và theo dõi chuyển động. Với bốn hoặc nhiều vệ tinh hơn nữa thì có thể xác định được vị trí 3D của xe (vĩ độ, kinh độ và cao độ). Một khi vị trí của xe được xác định, GPS có thể tính toán được các thông tin khác chẳng hạn như tốc độ, theo dõi con đường phía trước, khoảng cách đích đến.
5. Hệ thống phát hiện điểm mù
Hệ thống phát hiện điểm mù là một trong những công nghệ được sử dụng trên xe ô tô thông qua máy ảnh, cảm biến radar và các hệ thống siêu âm cảnh báo cho người lái xe.
Khi bạn đang đi trong một con đường hẹp, bạn sẽ không thể thấy hết những gì đang xảy ra hoặc tiến tới xung quanh. Trong trường hợp này, BSD cho phép người lái xe biết về các đối tượng xung quanh.
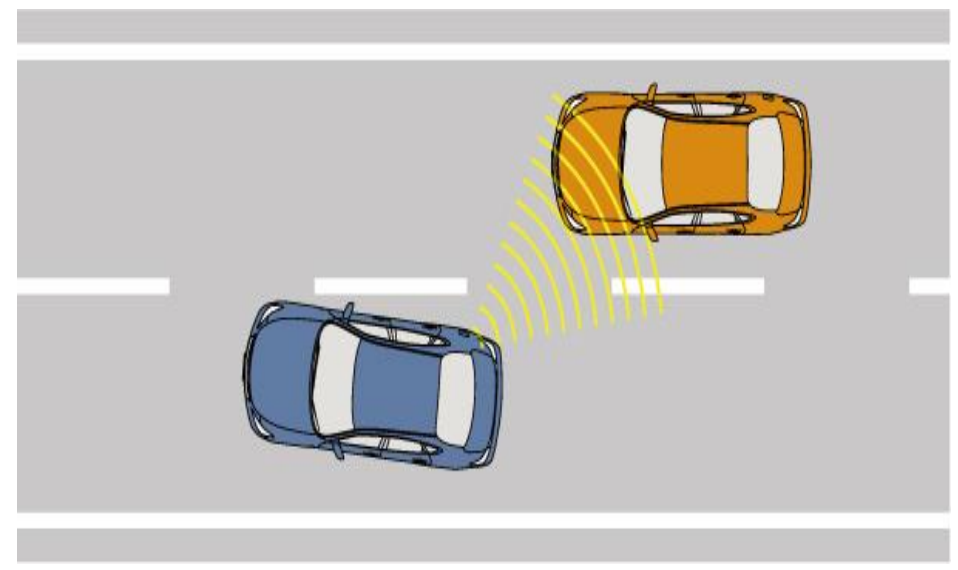
Hình 4. Cảm biến phát hiện xe ở đằng sau
Mới đây Mercedes-Benz đã đưa vào các dòng S, Cl-Class hệ thống Blind Spot Assist có thể phát hiện các điểm mù, hỗ trợ cho tài xế khi chuyển làn đường.
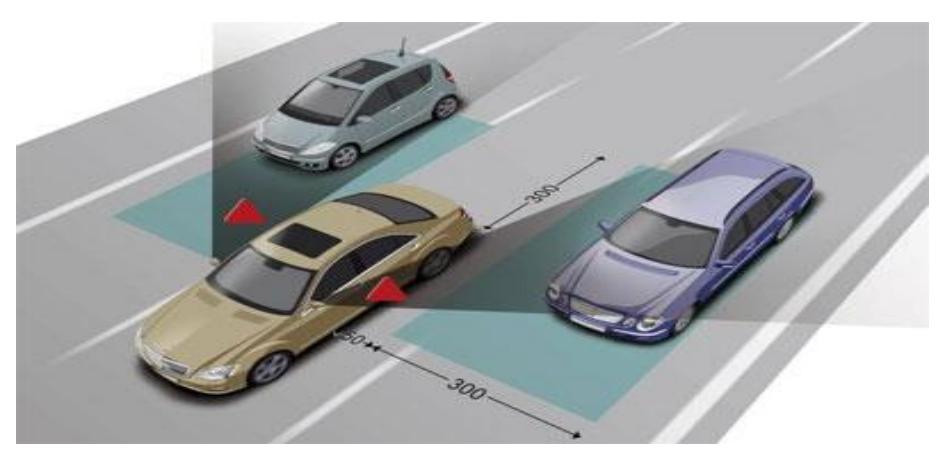
Hình 5. Cảm biến đặt tại kính chiếu hậu phát hiện khoảng cách các xe bên.
Hệ thống này được trang bị 6 radar bố trí phía trước và sau xe để có thể phát hiện được các chướng ngại vật có thể gây va chạm khi chuyển làn đường. Khi xe cộ phía sau đi vào khu vực nhận biết của radar, đèn cảnh báo sẽ được báo phía gương chiếu hậu 2 bên sườn xe để cho tài xế biết có thể nguy hiểm khi chuyển làn. Các cảm biến phía trước làm việc trong tương quan của các cảm biến phía sau để đảm bảo rằng chiếc xe đang ở khoảng cách an toàn. Nó sẽ gửi trực tiếp tình trạng của chiếc xe cho màn hình hiển thị trong xe.
6. Hệ thống cảnh báo va chạm CAS
CAS là hệ thống được thiết kế để ngăn chặn va chạm từ phía trước cũng như phía sau với những xe khác đứng yên hoặc di chuyển trên cùng một hướng. Một vài nghiên cứu đã cho thấy rằng người lái xe mất tập trung hoặc không chú ý là một yếu tố trong phần lớn các tai nạn. Hệ thống có nhiệm vụ cảnh báo người lái xe sắp xảy ra va chạm ngay cả khi tốc độ thấp (như lái trong đô thị) và tốc độ cao (đường cao tốc). Hệ thống CAS xác định va chạm có thể xảy ra dựa trên điều kiện lái xe, khoảng cách và tốc độ với xe phía trước. CAS sử dụng sóng Radar milimet để phát hiện chiếc xe phía trước trong phạm vi 100m. Và sau đó nó tính khoảng cách với xe đó, tốc độ tương đối và dự kiến đoạn đường xác định khả năng va chạm. Nếu hệ thống phát hiện có khả năng va chạm, nó sẽ phát ra cảnh báo âm thanh và xúc giác (xiết giây an toàn) để cảnh báo người lái xe tai nạn. Hệ thống cũng kết hợp với một số chức năng giảm va chạm cho hành khách khi va chạm không thể tránh được. Như chức năng hỗ trợ phanh để bù đắp cho áp lực bàn đạp phanh không đủ, dây an toàn xiết chặt hơn đảm bảo người lái xe được giữ chặt. CAS cũng là hệ thống phanh khẩn cấp tự động. Ở tốc độ trên 30km/h những chiếc xe cố định hoặc di chuyển phía trước được phát hiện trong 100m.
Những tin mới hơn
Những tin cũ hơn
- Chính sách bảo đảm chất lượng giai đoạn 2025 –...
- Triết lý giáo dục, sứ mạng, tầm nhìn và giá trị...
- Khoa Ô tô – địa chỉ đào tạo uy tín, chất lượng
- Triết lý giáo dục Trường Đại học Sao Đỏ
- Tham gia vòng chung kết cuộc thi sáng tạo Robocon...
- 068/QĐ-ĐHSĐ - QĐ vv hỗ trợ chi phí học tập cho SV...
- Kế hoạch Tổ chức các hoạt động chào mừng ngày Nhà...
- Tuyển sinh viên học lớp Kỹ thuật viên Toyota khóa...
- Đội OTOSDU01 và đội SAODOHD2 trường đại học Sao Đỏ...
- Bộ Giáo dục và đào tạo công bố quy chế tuyển sinh...
- Đang truy cập71
- Hôm nay
- Tháng hiện tại
- Tổng lượt truy cập