

Phát hiện chướng ngại vật bằng cảm biến LIDAR
Lượng lớn các cảm biến của hệ thống cung cấp một tầm nhìn toàn diện và dự phòng bằng các phương thức cảm biến. LIDAR cung cấp dữ liệu và phát hiện chướng ngại vật ở gần xe và RADAR cung cấp nhận thức về phương tiện di chuyển ở tầm xa. Trong bài viết này tác giả cung cấp một số thông tin về cảm biến LIDAR dùng cho xe chạy tự động.
Những nghiên cứu theo dõi xe trước đó đã sử dụng sự quan sát của máy tính để phát hiện những chiếc xe khác và đối tượng di chuyển khác như là người đi bộ. Nghiên cứu trong tài liệu tầm nhìn dành cho việc theo dõi xe, các kỹ thuật được phát triển bởi Stein và cộng sự (Stein, Mano, & Shashua, 2000, 2003) là rất đáng chú ý vì nó cung cấp cơ sở cho sự phát triển của một sản phẩm thương mại: Mobileye, hệ thống ô tô theo dõi trực quan. Hệ thống Mobileye thực hiện tốt cho việc theo dõi xe ở phía trước và phía sau trong suốt quá trình xe ở trên đường cao tốc nhưng nó không cung cấp một giải pháp tổng hợp đủ cho những con đường có độ cong lớn và các tình huống lộn xộn gặp phải trong cuộc thi thách thức đô thị UCE. Một nỗ lực trước đó trên cơ sở tầm nhìn phát hiện chướng ngại vật (nhưng không ước tính vận tốc) sử dụng phần cứng tùy chỉnh (Bertozzi & Broggi, 1998).
Một phát hiện đáng kể là hệ thống theo dõi giao thông đô thị từ dữ liệu LIDAR được phát triển bởi Wang (2004), người đã kết hợp theo dõi đối tượng di chuyển trên bản đồ không gian 3 chiều, đồng thời cục bộ hóa và lập hệ thống bản đồ (SLAM). Liên kết dữ liệu và theo dõi các đối tượng di chuyển là một bộ lọc cho iệc xây dựng SLAM để làm giảm các tác động của các đối tượng di chuyển, tránh làm hỏng bản đồ đã được xây dựng. Thuật toán theo dõi đối tượng sử dụng nhiều mô hình tương tác (IMM) (Blom & Bar-Shalom, 1988) cho xác xuất liên kết dữ liệu. Một dự án liên quan đến việc giải quyết và theo dõi người đi bộ và những đối tượng di chuyển để phát triển hệ thống cảnh báo va chạm trên trình điều khiển xe buýt trong thành phố (Thorpe và cộng sự, 2005). Mỗi đội tham dự trong UCE được yêu cầu một giải pháp phát hiện và theo dõi các phương tiện khác. Các kỹ thuật của đội đua Stanford (Stanford Racing Team, 2007) và đội đua Tartan (Tartan Racing, 2007) là những ví dụ khác về cách tiếp cận thành công. Việc theo dõi xe của đội Tartan được xây dựng dựa trên thuật toán của Mertz và cộng sự (2005), nó phù hợp với công nghệ LIDAR, ước tính góc lồi từ các dữ liệu thu từ laser để phát hiện xe.
Nhóm nghiên cứu của Đại học Stanford theo dõi đối tượng có điểm tương đồng với cách tiếp cận của đội MIT. Nó dựa trên việc lọc các chướng ngại vật và đo đạc trên mặt đất cũng như những thuận lợi từ khu vực bên ngoài RNDF, thuận lợi còn lại là trang bị hình chữ nhật 2 chiều sử dụng bộ lọc và ước tính vận tốc cho những đối tượng di chuyển. Sự độc đáo của nhóm MIT là phương pháp tiếp cận xử lý đồng thời giữa công nghệ LIDAR, dữ liệu RADAR và kỹ thuật hiệu chỉnh nhiều cảm biến mới.
Hệ thống phát hiện chướng ngại vật của MIT kết hợp dữ liệu từ 7 LIDAR phẳng sắp xếp theo chiều ngang trên mui xe và 15 ra đa. Các LIDAR phẳng là một đơn vị SICK quay 180 điểm với khoảng cách 1 độ, quét ở tần số 75Hz. Các đơn vị SICK ở chế độ quét xen kẽ, trong đó mỗi lần quét được bù 0.250 từ lần quét trước đó, điều này làm tăng độ nhạy của hệ thống với những chướng ngại vật nhỏ, làm cho nó lớn hơn và tầm nhìn rộng hơn. MIT sử dụng Velodyne LIDAR độ nét cao, trong đó có 64 laser sắp xếp theo chiều dọc, trên một thiết bị quay tròn, quét ở 3600 , tần số 15Hz.
Đơn vị ra đa ACC3 Delphi của MIT là duy nhất trong số các cảm biến của họ được triển khai trên xe ô tô thị trường để hổ trợ cho tính năng “ chạy tự động” ở tốc độ cao trên đường cao tốc. Vì mỗi rada tầm nhìn chỉ 180 , MIT đã bố trí 15 radar chồng chéo với nhau theo kiểu lợp ngói để đạt được tầm nhìn 2560. Tầm nhìn LIDAR phẳng và radar được hiển thị trong Hình 2.10. Tầm nhìn 3600 của Velodyne là một vòng xung quanh xe trải dài từ 5-60m. Tầm nhìn rộng có thể đạt được thông qua việc sử dụng nhiều cảm biến hoặc số lượng ít hơn các cảm biến dẫn động. Cảm biến dẫn động có cấu tạo phức tạp hơn (cụ thể như: cơ cấu chấp hành, cơ cấu kiểm soát mạch và các thông tin phản hồi từ cảm biến), làm tăng thêm vấn đề kiểm soát và cuối cùng là nó tạo ra ít dữ liệu hơn. Với những lý do đó MIT đã chọn sử dụng nhiều cảm biến cố định hơn và ít hơn cảm biến cơ học dẫn động.
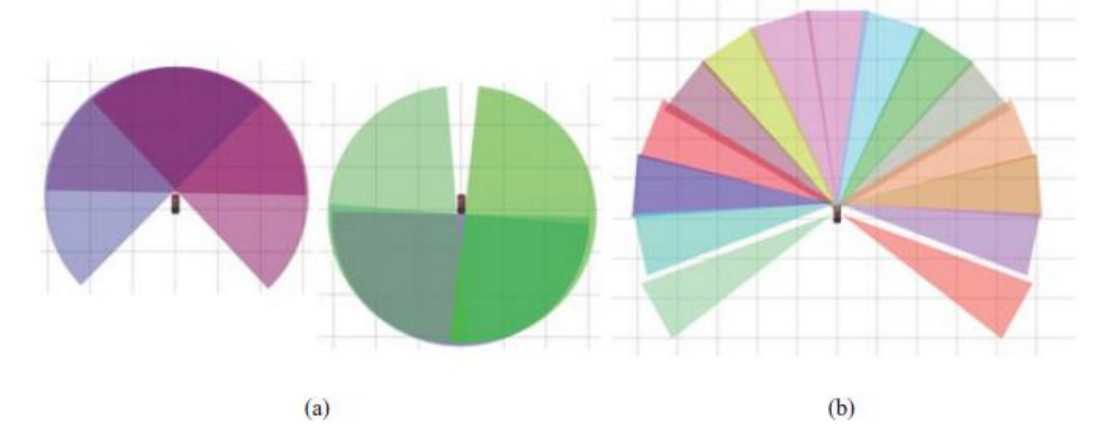
Hình 1. Tầm nhìn của của biến. (a) xe sử dụng bảy LIDAR phẳng gắn ngang với tầm nhìn 1800 . 3 LIDAR ở phía trước và 4 LIDAR ở phía sau. (b) 15 radar 180 mang lại một tầm nhìn rộng
Hệ thống theo dõi chướng ngại vật đã được tách riêng thành hai hệ thống phụ độc lập, một sử dụng dữ liệu LIDAR và một sử dụng radar. Mỗi hệ thống được điều chỉnh riêng để tỉ lệ sai khác ở mức thấp. Đầu ra của các hệ thống cao cấp là đầu ra tổng hợp của các hệ thống phụ. Tổng hợp những sơ đồ dữ liệu đơn giản đó cho phép mỗi hệ thống phụ được phát triển riêng và theo cách tương đương, làm cho nó dễ dàng thêm hoặc loại bỏ các tác động bởi hiệu suất dự tính của một hệ thống phụ. Từ góc độ tin cậy, chiến lược này có thể ngăn chặn ảnh hưởng từ những lỗi của một hệ thống phụ đến toàn hệ thống.
Những tin mới hơn
Những tin cũ hơn
- Chính sách bảo đảm chất lượng giai đoạn 2025 –...
- Triết lý giáo dục, sứ mạng, tầm nhìn và giá trị...
- Khoa Ô tô – địa chỉ đào tạo uy tín, chất lượng
- Triết lý giáo dục Trường Đại học Sao Đỏ
- Tham gia vòng chung kết cuộc thi sáng tạo Robocon...
- 068/QĐ-ĐHSĐ - QĐ vv hỗ trợ chi phí học tập cho SV...
- Kế hoạch Tổ chức các hoạt động chào mừng ngày Nhà...
- Tuyển sinh viên học lớp Kỹ thuật viên Toyota khóa...
- Đội OTOSDU01 và đội SAODOHD2 trường đại học Sao Đỏ...
- Bộ Giáo dục và đào tạo công bố quy chế tuyển sinh...
- Đang truy cập70
- Hôm nay
- Tháng hiện tại
- Tổng lượt truy cập