

Phân loại và phương thức giao tiếp mạng CAN
Hiện nay trên các xe hiện đại, mạng CAN được dần phổ biến và sử dụng rộng rãi trên các xe đặc biệt các loại xe Châu Âu. Trong bài viết này, tác giả sẽ giới thiệu các loại mạng CAN và cách giao tiếp mạng CAN.
1. Phân loại CAN bus
Dựa trên tính chất vật lý của bus, cần thiết phải phân biệt 2 dạng truyền trên bus:
- Dạng truyền CAN tốc độ thấp.
- Dạng truyền CAN tốc độ cao.
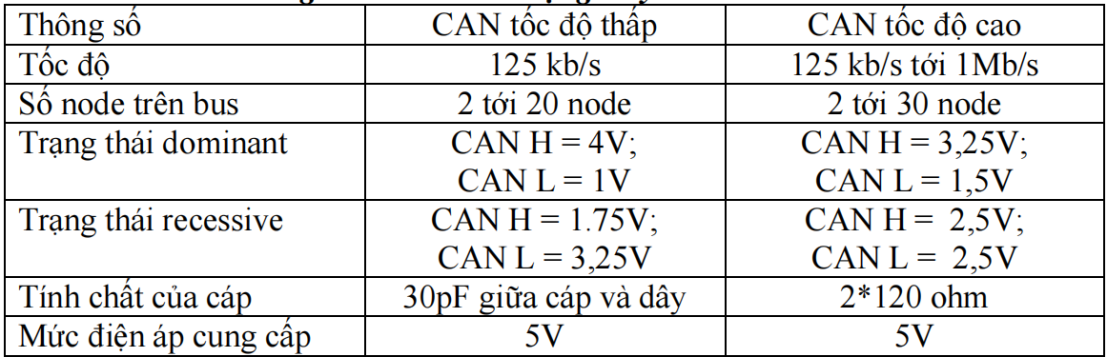
Tính chất cơ bản khác nhau giữa 2 dạng được nêu trong bảng 1. Mức điện áp hoạt động được biểu thị trên hình 1 và hình 2.
Bus CAN định nghĩa hai trạng thái là “dominant” và “recessive”, tương ứng với hai trạng thái là 0 và 1. Trạng thái “dominant” chiếm ưu thế so với trạng thái “recessive”. Bus chỉ ở trạng thái “reccessive” khi không có node nào phát đi trạng thái “dominant”. Điều này tạo ra khả năng giải quyết chanh chấp khi nhiều hơn một. Master cùng muốn chiếm quyền sử dụng bus.
Bảng 1.1. So sánh 2 dạng truyền của bus CAN
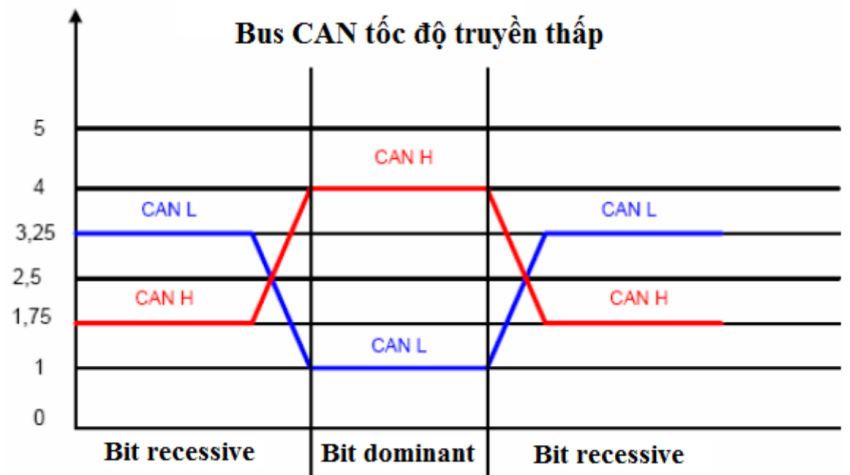
Hình 1. Điện áp làm việc Bus CAN tốc độ truyền thấp
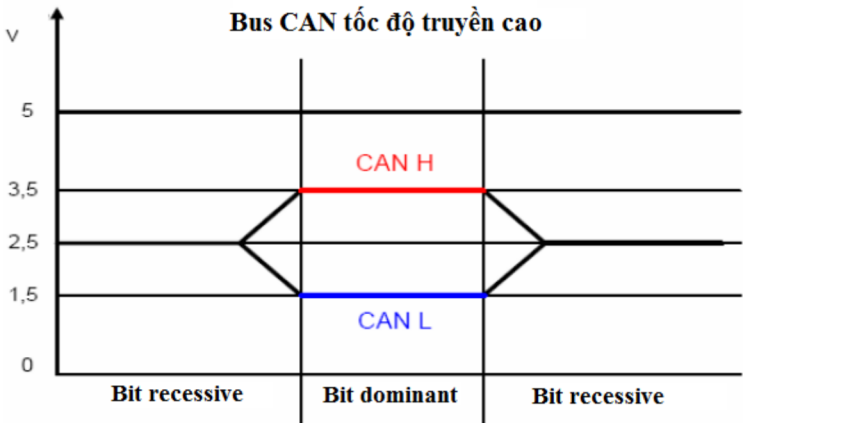
Hình 2. Điện áp làm việc Bus CAN tốc độ truyền cao
2. Nguyên tắc giao tiếp mạng CAN
Đặc trưng của bus CAN là phương pháp định địa chỉ và giao tiếp bằng gói dữ liệu, trong khi hầu hết các hệ thống bus khác đều giao tiếp dựa vào địa chỉ các trạm. Mỗi thông tin trao đổi trong mạng được coi như một đối tượng, được gán một mã ID. Thông tin được gửi trên bus theo kiểu truyền thông báo với độ dài có thể khác nhau.
Các thông báo không được gửi tới một địa chỉ nhất định mà bất cứ trạm nào cũng có thể nhận theo nhu cầu. Nội dung mỗi thông báo được các trạm phân biệt qua mã ID. Mã ID không nói lên địa chỉ đích của thông báo, mà chỉ biểu diễn ý nghĩa của dữ liệu trong thông báo. Vì thế, mỗi trạm trên mạng có thể tự quyết định tiếp nhận và xử lý thông báo hay không tiếp nhận thông báo qua bộ lọc thông báo để phân biệt ID (message filtering). Thông qua bộ lọc này, nhiều trạm có thể đồng thời nhận cùng một thông báo và có các phản ứng khác nhau. Một node có thể yêu cầu một trạm khác gửi dữ liệu bằng cách gửi một yêu cầu thông qua remote frame.
Node có khả năng cung cấp nội dung thông tin đó sẽ gửi trả lại một khung dữ liệu data frame có cùng mã ID với khung yêu cầu. Bên cạnh tính năng đơn giản, cơ chế giao tiếp hướng đối tượng ở CAN còn mang lại tính linh hoạt và tính nhất quán dữ liệu của hệ thống. Một trạm CAN không cần biết thông tin cấu hình hệ thống (ví dụ địa chỉ của node), nên việc bổ sung hay bỏ đi một trạm trong mạng không đòi hỏi bất cứ một sự thay đổi nào về phần cứng hay phần mềm ở các trạm khác. Trong một mạng CAN, có thể chắc chắn rằng một thông báo hoặc được tất cả các trạm quan tâm tiếp nhận đồng thời, hoặc không được trạm nào tiếp nhận. Tính đồng nhất dữ liệu được đảm bảo qua các phương pháp gửi đồng loạt và xử lý lỗi.
Những tin mới hơn
Những tin cũ hơn
- Chính sách bảo đảm chất lượng giai đoạn 2025 –...
- Triết lý giáo dục, sứ mạng, tầm nhìn và giá trị...
- Khoa Ô tô – địa chỉ đào tạo uy tín, chất lượng
- Triết lý giáo dục Trường Đại học Sao Đỏ
- Tham gia vòng chung kết cuộc thi sáng tạo Robocon...
- 068/QĐ-ĐHSĐ - QĐ vv hỗ trợ chi phí học tập cho SV...
- Kế hoạch Tổ chức các hoạt động chào mừng ngày Nhà...
- Tuyển sinh viên học lớp Kỹ thuật viên Toyota khóa...
- Đội OTOSDU01 và đội SAODOHD2 trường đại học Sao Đỏ...
- Bộ Giáo dục và đào tạo công bố quy chế tuyển sinh...
- Đang truy cập49
- Hôm nay
- Tháng hiện tại
- Tổng lượt truy cập