

Một số giải pháp phát hiện nguy hiểm trên xe Talos
Đối tượng nguy hiểm bao gồm ổ gà, lề đường, và các đối tượng nhỏ khác. Các phát hiện nguy hiểm không nhằm mục đích phát hiện xe ô tô và các đối tượng lớn khác (có khả năng di chuyển), mục tiêu của mô đun này là để ước tính tình trạng của con đường nó đang đi.
Ngoài các Velodyne, Talos sử dụng năm LIDAR phẳng bố trí lệch nhau và có tầm nhìn hướng xuống, gắn trên mui xe, có nhiệm vụ chủ yếu là quan sát mặt đường. Nguyên tắc cơ bản của phát hiện nguy hiểm là tìm kiếm sự gián đoạn chiều cao trong quá trình quét laser. Trong một đợt nhỏ của tín hiệu laser trả về liên tục, độ dốc được tính toán bằng cách phân chia sự thay đổi khoảng cách giữa tín hiệu trả về riêng lẻ. Độ dốc này được lưu trong một bản đồ mạng lưới, ghi lại độ dốc lớn nhất quan sát thấy trong mỗi ô. Bản đồ lưới này dần được xây dựng qua thời gian khi các cảm biến quét qua mặt đất mới và bản đồ được mở rộng khoảng 40m ở các hướng.
Cảm biến Velodyne, với 64 laser, có thể quan sát một vùng rộng xung quanh chiếc xe. Tuy nhiên, các đối tượng nguy hiểm chỉ có thể được phát hiện nơi mà laser có thể quét qua. Laser của Velodyne soi qua mặt đất với 64 vòng tròn đồng tâm xung quanh chiếc xe.
Hiệu chuẩn laser của Velodyne là không đủ tin cậy để cho phép các gián đoạn được phát hiện bằng cách so sánh chiều cao của đối tượng nguy hiểm. Do đó, MIT xử lý mỗi laser Velodyne độc lập như một máy quét trực tuyến.
Không giống như các máy dò chướng ngại vật giả định rằng những chướng ngại vật sẽ được liên tục quan sát theo thời gian, phát hiện nguy hiểm là trạng thái ý nghĩa hơn vì độ dốc lớn nhất được quan sát ghi nhớ trong mỗi ô lưới (x, y). Một gián đoạn thẳng đứng theo bất kỳ hướng nào, nhưng lại là nguy hiểm tiềm tàng. Ví dụ về độ nhạy bất đẳng hướng này là lề đường, khi radar quét song song với lề đường, sự gián đoạn không được phát hiện. Chỉ khi lề đường được quét vuông góc thì hệ thống mới phát hiện đó là mối nguy hiểm. MIT gắn các cảm biến SICK để nó có khả năng quét vuông góc với lề đường để dễ dàng phát hiện (giả sử rằng đang lái xe song song với lề đường). Nhưng sự đa dạng về góc độ lấy mẫu mới là quan trọng và đáng tin cậy để phát hiện các nguy hiểm.
1. Loại bỏ các đối tượng di chuyển
Bản đồ lưới mô tả ở trên, ghi lại độ dốc xấu nhất được thấy ở mỗi vị trí (x, y), nó có xu hướng phát hiện chiếc xe di chuyển như là mối nguy hiểm lớn được đánh dấu trên quỹ đạo chuyển động của xe. Điều này là không mong muốn vì MIT muốn xác định tình trạng của mặt đường bên dưới xe.
Giải pháp của MIT là làm "trơn tru" những phát hiện đi đôi với việc phát hiện nguy hiểm. Chiều cao tối đa và tối thiểu xuất hiện trong suốt giai đoạn kết hợp 10ms được lưu trữ trong bản đồ lưới. Tiếp theo, 9 (3x3) khu vực lân cận của bản đồ lưới được kiểm tra, nếu tất cả chín khu vực đã nhận đủ một số lượng các phép đo và sự khác biệt tối đa ở chiều cao trục z là nhỏ thì các ô lưới sẽ được dán nhãn là "trơn tru". Những phân loại này sẽ ghi đè lên các phát hiện nguy hiểm. Nếu việc lái xe bằng tầm nhìn, nó có thể gây ra mối nguy hiểm tạm thời, nhưng ngay sau khi mặt đất bên dưới chiếc xe được nhìn thấy, mặt đất sẽ được đánh dấu một cách trơn tru để thay thế.
Kết quả của các phát hiện nguy hiểm và làm trơn tru các phát hiện thể hiện trong Hình 1. Bản đồ nguy hiểm cho thấy khu vực sáng hơn (màu xanh) trên con đường phía trước và phía sau có địa hình bằng phẳng, thông suốt. Dọc theo mép đường, các vùng đường tối hơn (màu đỏ) thể hiện địa hình không bằng phẳng.
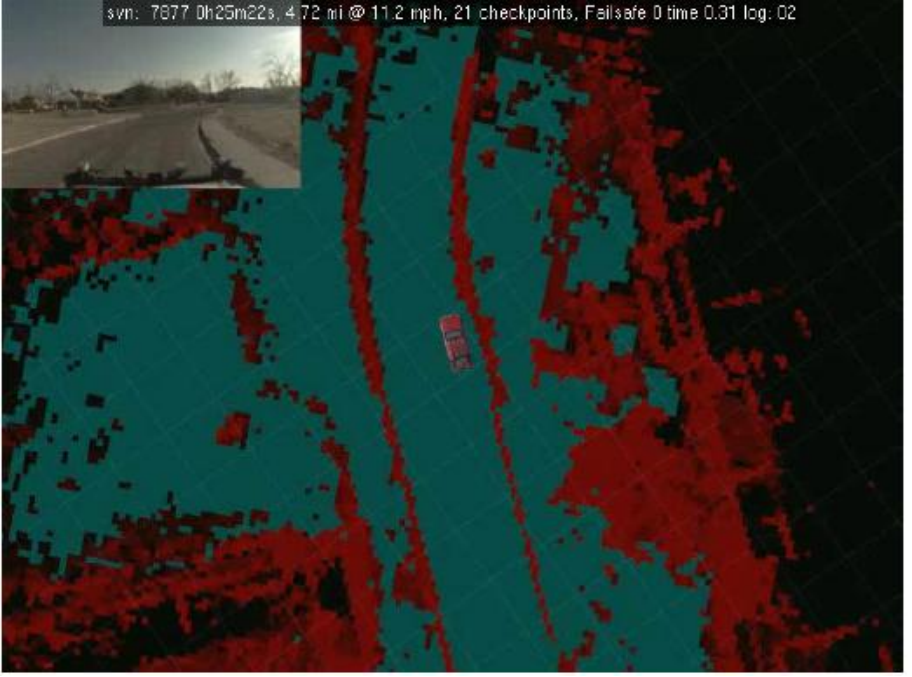
Hình 1. Bản đồ nguy hiểm
2. Vùng nguy hiểm cao.
Các bản đồ nguy hiểm đã được hợp nhất bởi bản đồ khả năng lái và khu vực trở ngại cao. Kế hoạch chuyển động qua địa hình nguy hiểm được hạn chế nhưng không loại bỏ hoàn toàn. Điều này là do phát hiện nguy hiểm dễ bị nhận tín hiệu giả vì hai lý do. Đầu tiên, nó được điều chỉnh có độ nhạy cao để ngay cả lề đường ngắn vẫn sẽ được phát hiện. Thứ hai, bởi vì bản đồ nguy hiểm là một hàm số của độ dốc theo trục z được nhìn thấy, tín hiệu giả có thể gây ra một mối nguy hiểm ảo mà sẽ tồn tại mãi mãi. Hậu quả duy nhất của một tín hiệu giả là xe có thể rẽ về hướng ảo gây nguy hiểm.
3. Phát hiện mép đường.
Mối nguy hiểm thường xuất hiện ở mép đường, Talos dễ dàng phát hiện các lề đường, bụi cỏ cao và tất cả các vật gây ra mối nguy hiểm mà có thể dễ dàng phân biệt từ mặt đường xe chạy.
Chiếc xe phát hiện mép đường bằng cách tạo ra các tia sáng ở vị trí hiện tại của xe và ghi lại ô nguy hiểm cao đầu tiên trong bản đồ lưới (Hình 2a). Điều này giúp phát hiện các điểm lề đường, đây là những phân đoạn trong các chuỗi dựa trên khoảng cách vật lý của nó với nhau. Một đường cong phi tham số sau đó được trang bị thông qua từng chuỗi (Hình 2b). Các chuỗi rất ngắn hoặc có độ cong quá mức sẽ bị loại bỏ, còn lại là đầu ra các phần khác của hệ thống.
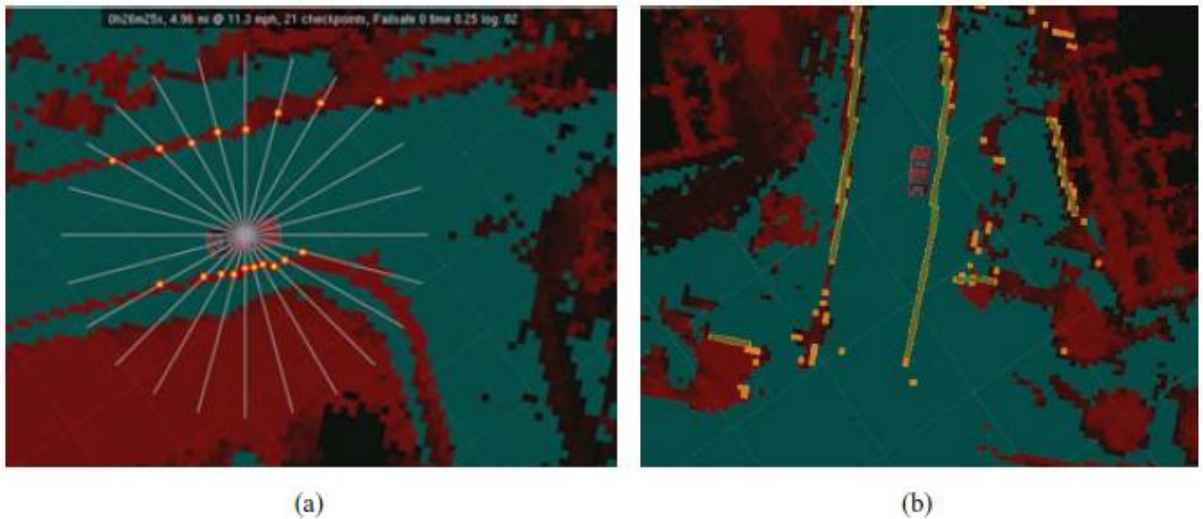
Hình 2. Bản đồ nguy hiểm, vùng ánh sáng trên đường cho thấy địa hình bằng phẳng. Vùng tối dọc theo mép đường chỉ địa hình không bằng phẳng như vết cắt lề đường hoặc gờ. (a) Tia sáng phát ra từ chiếc xe được sử dụng để phát hiện các mép đường. (b) đường đa tuyến gắn với mép đường.
Những tin mới hơn
Những tin cũ hơn
- Chính sách bảo đảm chất lượng giai đoạn 2025 –...
- Triết lý giáo dục, sứ mạng, tầm nhìn và giá trị...
- Khoa Ô tô – địa chỉ đào tạo uy tín, chất lượng
- Triết lý giáo dục Trường Đại học Sao Đỏ
- Tham gia vòng chung kết cuộc thi sáng tạo Robocon...
- 068/QĐ-ĐHSĐ - QĐ vv hỗ trợ chi phí học tập cho SV...
- Kế hoạch Tổ chức các hoạt động chào mừng ngày Nhà...
- Tuyển sinh viên học lớp Kỹ thuật viên Toyota khóa...
- Đội OTOSDU01 và đội SAODOHD2 trường đại học Sao Đỏ...
- Bộ Giáo dục và đào tạo công bố quy chế tuyển sinh...
- Đang truy cập66
- Hôm nay
- Tháng hiện tại
- Tổng lượt truy cập