Giới thiệu về các cảm biến trên xe Talos
- Thứ bảy - 29/01/2022 15:52
- In ra
- Đóng cửa sổ này
Xe Talos là sản phẩm của nhóm nghiên cứu MIT phát triển trên chiếc xe nguyên mẫu Land Rover LR3 tham gia cuộc thi thách thức đô thị UCE do bộ quốc phòng Mỹ tổ chức. Trong bài viết này sẽ giới thiệu các cảm biến trên xe Talos đã tham gia cuộc thi UCE năm 2007.
Các cảm biến được định vị và định hướng để hầu hết các điểm xung quanh của chiếc xe sẽ được quan sát bởi ít nhất một cảm biến của mỗi loại: LIDAR, radar, và cảm biến tầm nhìn. Cách bố trí này bảo đảm hệ thống có thể hoạt động bình thường khi hai cảm biến bị hỏng hoặc bị che khuất tầm nhìn. LIDAR phẳng được gắn ở nhiều độ cao, kết hợp với đầu ra từ một Velodyne 3D LIDAR để phát hiện chướng ngại vật trong cự ly gần. “Pushbroom” (downward-canted SICK) LIDARs và các dữ liệu Velodyne phát hiện các bề mặt mà xe có thể chạy được. Ngoài phạm vi LIDAR, radar sóng milimet phát hiện xe đang gần kề.
1. Velodyne HDL-64
Velodyne HDL-64 (Hình 2.5) là cảm biến chính trong phát hiện chướng ngại vật, nó được đặt trên bục cao của mui xe. Vị trí cao của cảm biến rất cần thiết để tăng tầm nhìn (FOV). Velodyne là một máy quét laser 3D bao gồm 64 laser được đặt trên một cái đầu quay. Nó tạo ra khoảng một triệu mẫu trên một giây, góc quét 360° với tần số 15Hz.
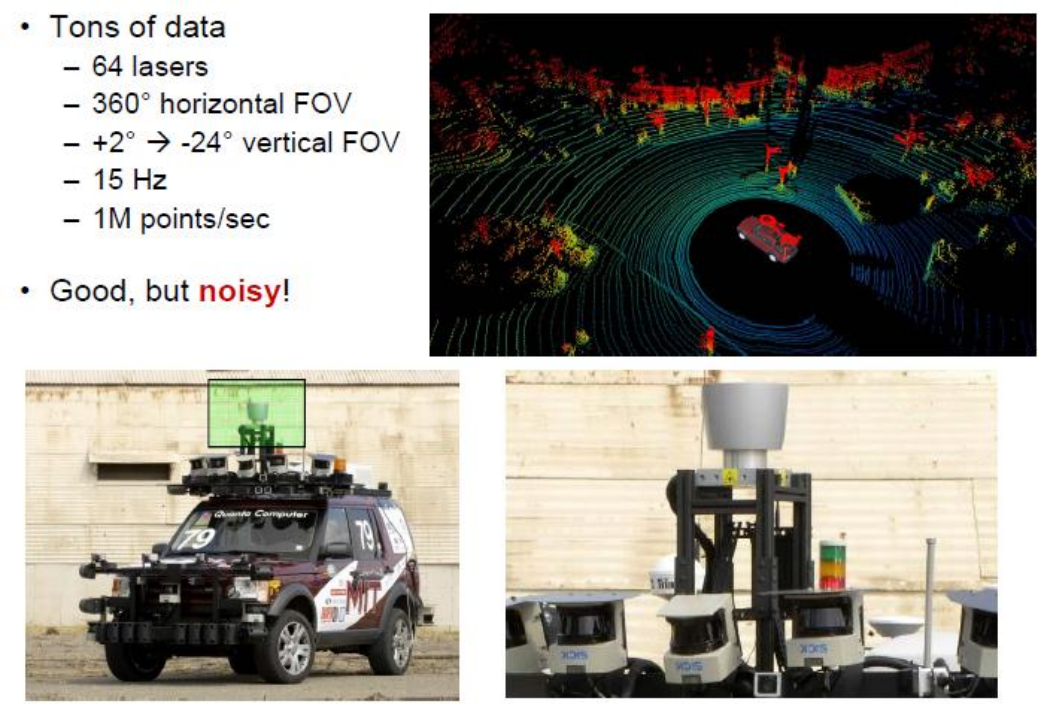
Hình 1. Velodyne HDL-64.
2. LIDAR SICK
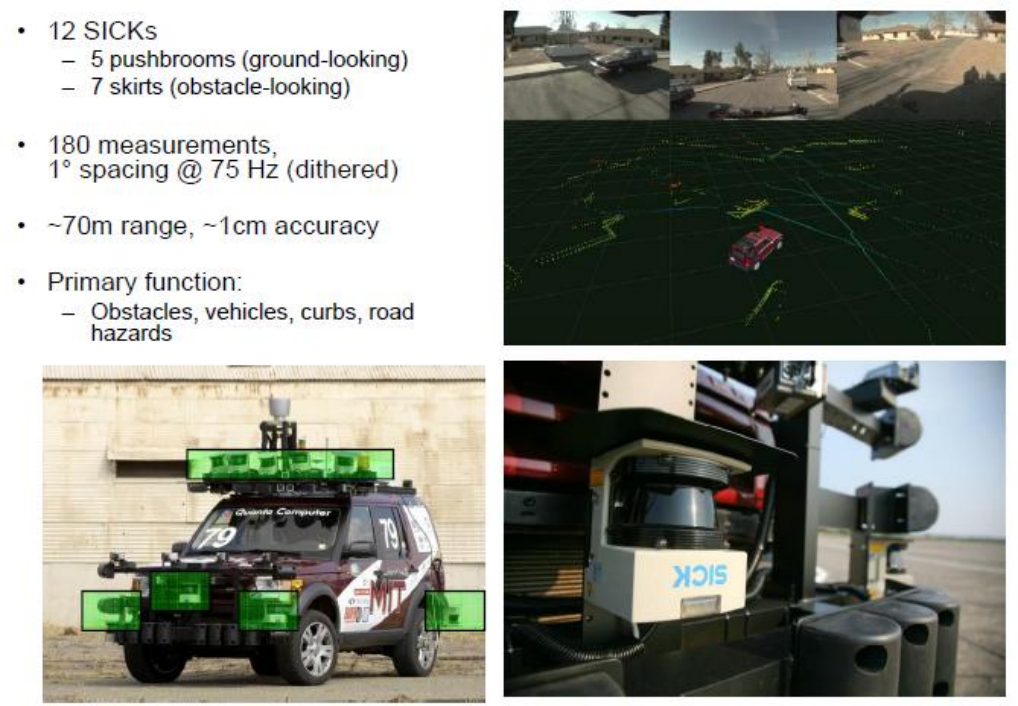
Hình 2. LIDAR SICK.
Những đơn vị LIDAR SICK (tất cả là loại LMS 291-S05) phục vụ cho hệ thống phát hiện các chướng ngại vật tầm gần và tình trạng bề mặt đường. Ở trên mui xe có 5 LIDAR SICK có góc nhìn hướng xuống để quan sát mặt đường phía trước xe, 7 cái còn lại được đặt thấp hơn ở hai bên chiếc xe và tạo một đường thẳng song song với mặt đường.
Mỗi bộ cảm biến SICK quét xen kẽ của 180 điểm phẳng với tần 75Hz. Mỗi đơn vị LIDAR SICK kết nối dữ liệu nối tiếp được đọc bởi máy MOXA Nport-6650,những đơn vị này được gắn vào giá đỡ thiết bị bên trên máy tính, có tới 16 cổng đầu vào dữ liệu nối tiếp và đầu ra của TCP/IP.
3. Bộ điều hướng Applanix POS-LV
Bộ điều hướng Applanix POS-LV (Hình 2.7) được sử dụng để xác định vị trí tương đối, ước tính và định hướng cho xe. Hệ thống Applanix kết hợp với GPS, cảm biến quán tính IMU, và cảm biến odometry để ước tính vị trí của xe, xác định hướng, tốc độ, và số vòng quay. Thông tin vị trí được sử dụng để xác định vị trí tương đối của chiếc xe trong RNDF. Thông tin về hướng và tốc độ được sử dụng để ước tính chuyển động cục bộ của xe theo thời gian. Thiết bị Applanix được giao tiếp thông qua kết nối TCP/IP.
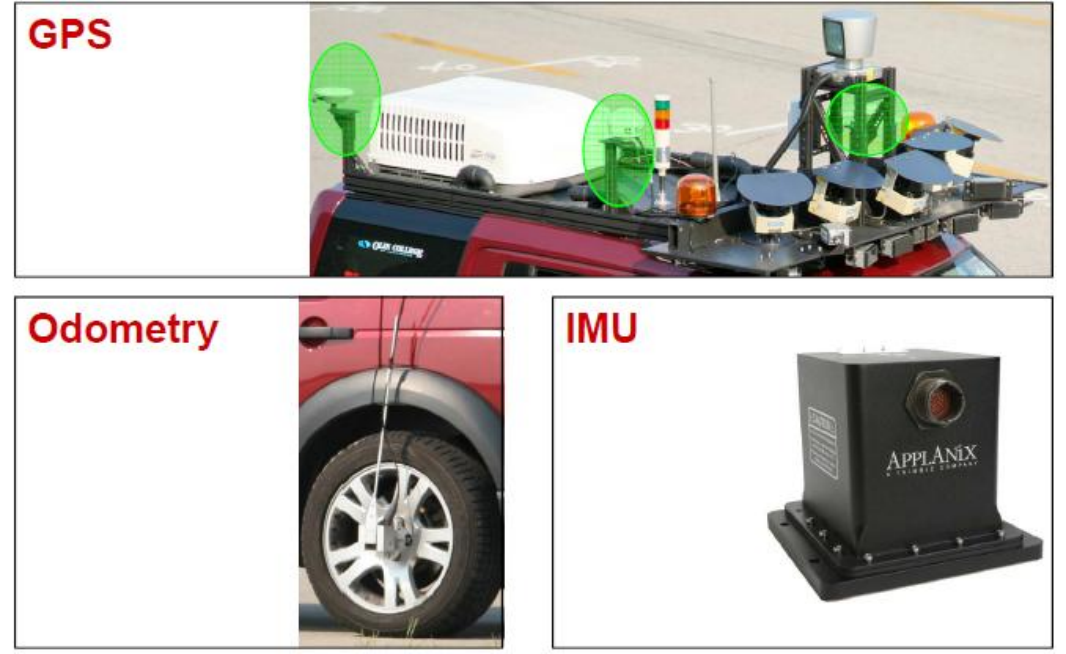
Hình 3. Bộ điều hướng Applanix.
4. Radar Delphi
Sóng OEM milimet trên xe của Delphi kết hợp với radar điều khiển hành trình được sử dụng để theo xe (được minh họa ở Hình 2.8). Với tầm nhìn hẹp của những radar đó (khoảng 18°) nên yêu cầu phải có 15 radar để đạt được tầm nhìn mong muốn là 240°. Các radar yêu cầu một giao tiếp chuyên biệt CAN bus. Để hổ trợ 15 mạng lưới CAN bus cần 8 bộ chuyển đổi Ethernet (EthCANs). Mỗi bộ chuyển đổi có thể hổ trợ 2 CAN bus.
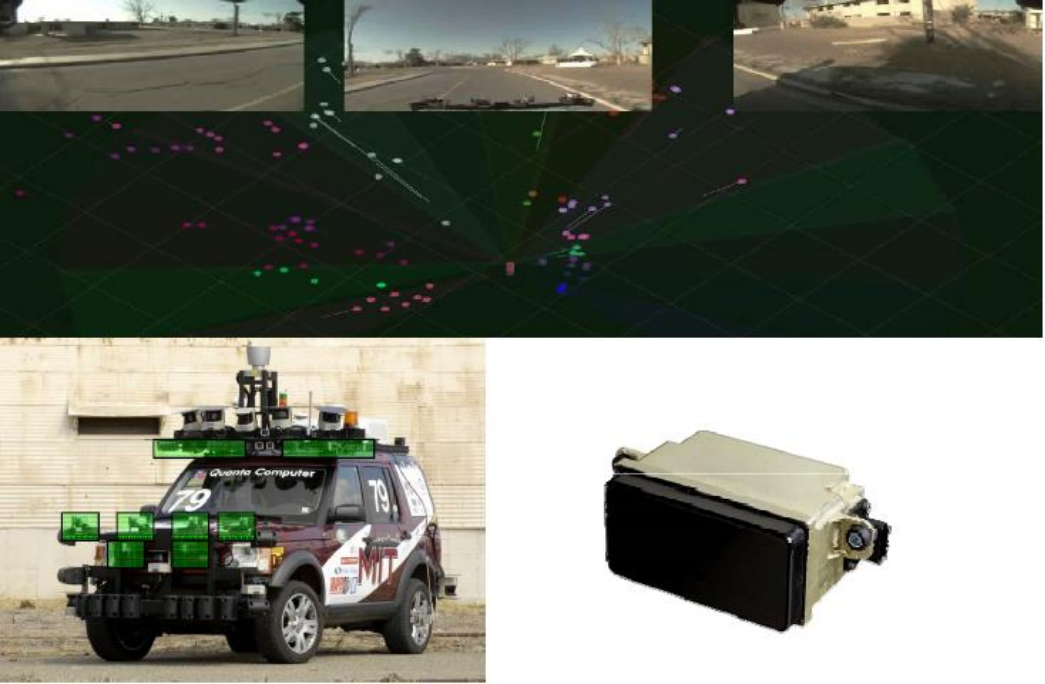
Hình 4. Radar Delphi với góc quét 2400.
5. Camera Point Grey Firefly MV
5 Camera Point Grey Firefly MV trang bị trên xe, tạo tầm nhìn gần 360°. Mỗi camera hoạt động với tầng số 22.8Hz và cho ra ảnh bayer-tiled với đội phân giải 752×480. Điều này dẫn đến dữ liệu hình ảnh có thể lên đến 39Mb/s hoặc 2.4Gb/min. Để hổ trợ những thuật toán xữ lý nhiều hình ảnh song song với nhau, dữ liệu máy ảnh được chuyển thành định dạng JPEG và sau đó được truyền lại bằng phương thức truyền dữ liệu UDP multicast đến các máy tính khác. Điều này cho phép xử lý nhiều hình ảnh và khai thác thuật toán hoạt động trên dữ liệu camera song song với tối thiểu độ trễ.
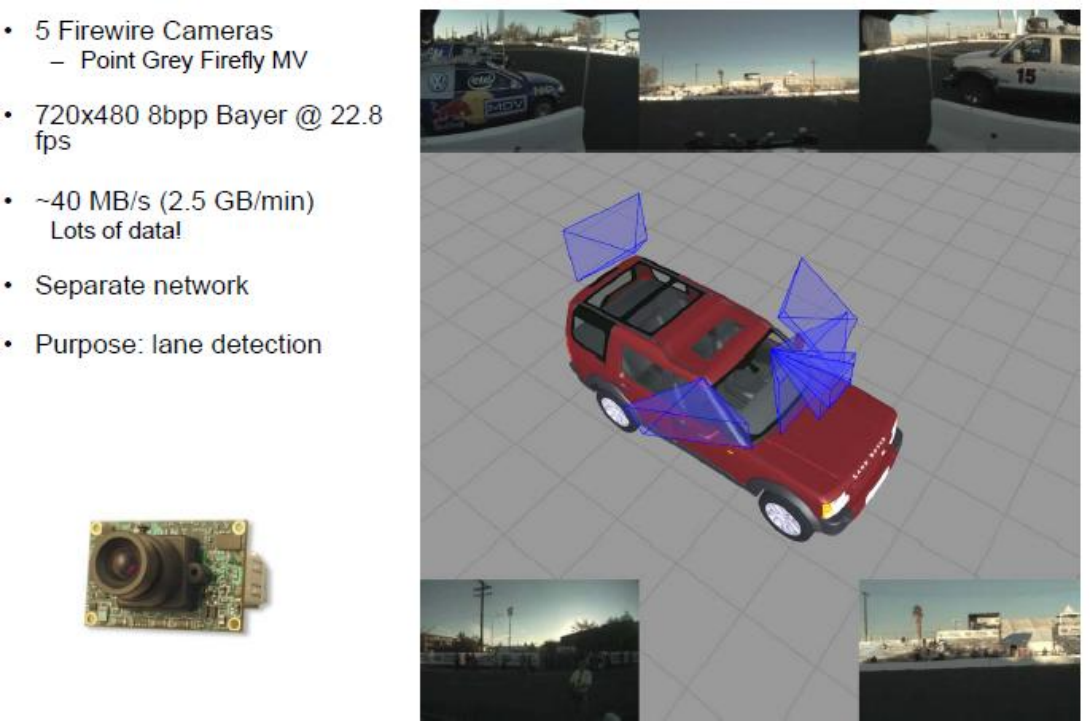
Hình 5. Camera Point Grey Firefly MV với tầm nhìn gần 3600.