Cách tìm đường trên xe Talos
- Thứ hai - 07/03/2022 22:41
- In ra
- Đóng cửa sổ này
Xe Talos là sản phẩm của nhóm nghiên cứu MIT phát triển trên chiếc xe nguyên mẫu Land Rover LR3 tham gia cuộc thi thách thức đô thị UCE do bộ quốc phòng Mỹ tổ chức. Trong bài viết này sẽ giới thiệu cách tìm đường trên xe Talos đã tham gia cuộc thi UCE năm 2007.
Phát hiện làn đường có ba giai đoạn. Đầu tiên, hệ thống phát hiện và định vị vệt sơn vạch đường trong mỗi khung hình, sử dụng dữ liệu LIDAR để giảm tỷ lệ phát hiện tín hiệu giả. Thứ hai, giai đoạn xử lý các phát hiện vệt sơn đường cùng với phát hiện lề đường để ước tính các vạch đường trung tâm gần kề làn xe di chuyển.
Cuối cùng, các vạch đường trung tâm phát hiện ở giai đoạn thứ hai được sàn lọc, theo dõi, và hợp nhất với một hoặc nhiều làn đường phi tham số.
1. Camera hiệu chỉnh tuyệt đối
Các thuật toán phát hiện vệt sơn đường giả định rằng GPS và dữ liệu cảm biến quán tính IMU có đủ tin cậy, chính xác cho những thay đổi trong thời gian ngắn của xe theo trục x, y, z trong suốt quá trình xử lý hình ảnh. Ngoài ra, thông số bên trong (độ dài tiêu cự, trung tâm, và biến dạng) và bên ngoài của camera đã được hiệu chỉnh theo thời gian. "Hiệu chỉnh tuyệt đối" cho phép xử lý trước các hình ảnh theo nhiều cách (Hình 2.21):
· Đường chân trời được chiếu vào mỗi khung hình ảnh. Chỉ các dòng điểm ảnh bên dưới đường được xem xét để tiếp tục xử lý.
· LIDAR phát hiện chướng ngại vật, thông tin thời gian thực về vị trí của các chướng ngại vật trong vùng lân cận của xe. Những chướng ngại vật này được chiếu vào hình ảnh, một bước quan trọng trong việc giảm tín hiệu giả.
· Các dữ liệu quán tính cho phép lập kế hoạch cho vị trí mong muốn của bề mặt đất vào hình ảnh, tạo thuận lợi cho các thuật toán phát hiện sơn.
· Lỗi phát hiện sơn sai gây ra do vết mờ trên ống kính có thể được phát hiện và bị loại bỏ.
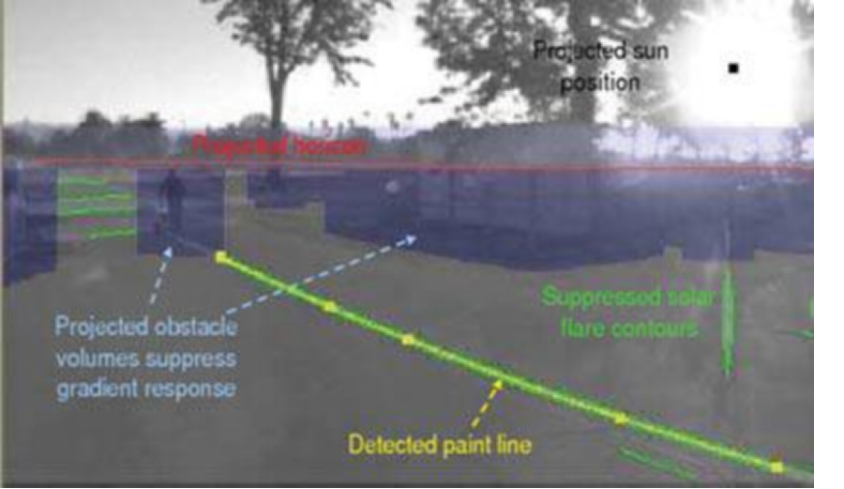
Hình 1. Sử dụng camera hiệu chỉnh tuyệt đối cho kế hoạch đưa thực tế vào hình ảnh.
2. Phát hiện vệt sơn đường
MIT sử dụng hai thuật toán để phát hiện các loại vệt sơn đường để tạo thành ranh giới làn đường. Cả hai thuật toán sử dụng dữ liệu đầu vào là khung thô và tạo ra tập hợp kết nối các đoạn đường ngắn. Các thuật toán phi trạng thái và mỗi khung ảnh của mỗi camera độc lập với nhau.
Các thuật toán đầu tiên áp dụng theo một chiều ngang và dọc tương ứng với các bộ lọc, chiều rộng dự kiến của một dòng sơn được đánh dấu thành hàng trên hình ảnh. Như Hình 2.22, các bộ lọc loại bỏ thành công hầu hết các khung cảnh lộn xộn trong khi vẫn tạo ra các phản hồi mạnh mẽ. Thuật toán thứ hai kết nối các cực đại gần đó vào các đường cong tương ứng với làn đường xuyên suốt. Kết nối được thiết lập bằng cách tạo ra các đường cong tiềm năng bằng cách sử dụng chức năng chuyển đổi khoảng cách tạo ra từ danh sách các cực đại.
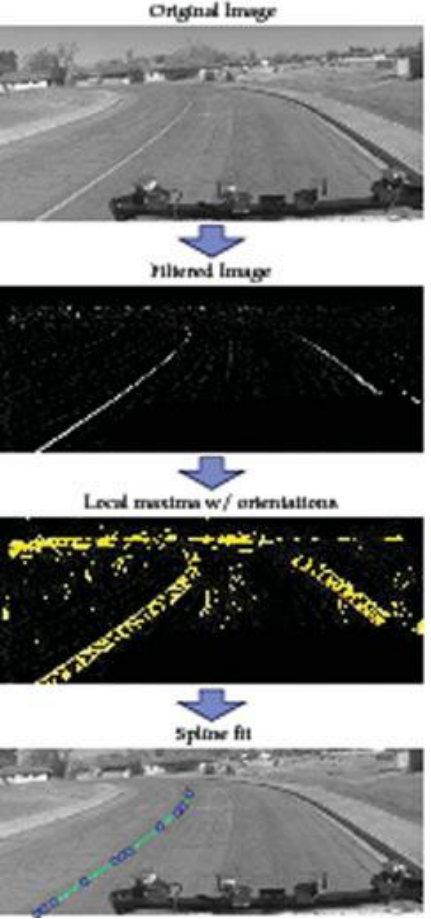
Hình 2. Sự phù hợp phát hiện dựa trên bộ lọc từ đầu đến kết thúc
Hình ảnh ban đầu được lọc với một bộ lọc phù hợp tại mỗi hàng. Cục bộ cực đại trong các phản ứng lọc được liệt kê và chi phối bởi các phương hướng tính của nó. Hình ảnh này mô tả phương hướng bằng cách vẽ các đường vuông góc với nhau. Cuối cùng, cực đại được kết nối vào khối đường cong Hermite.
Thuật toán thứ hai để phát hiện vệt sơn đường xác các cặp ranh giới sơn sát nhau và gần như song song trong không gian thực tế (Hình 2.23). MIT tính toán hướng và độ lớn của độ dốc trong không gian hình ảnh. Tiếp theo, thuật toán kết nối thành phần tạo ra đường nét mượt mà tại những điểm gián đoạn. Thuật toán được lặp lại để phát triển đường cong của vạch đường trung tâm. Hệ thống làm trơn tru toàn bộ những đường cong phức tạp bằng những parabol phù hợp. Cuối cùng, hệ thống đã loại bỏ tất cả các đường cong ngắn hơn ngưỡng cho phép để cho ra kết quả vệt sơn đường cuối cùng.
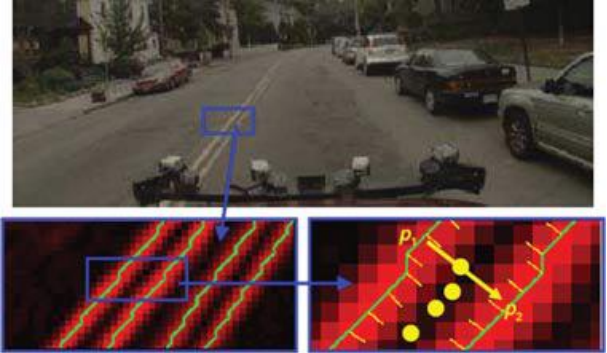
Hình 3. Phát triển từ hình ảnh ban đầu, đường viền biên, và đường viền đối xứng theo cặp tạo thành vạch tâm đường dự kiến.
3. Ước tính vạch tâm đường
Giai đoạn thứ hai của tìm kiếm làn đường là ước tính hình học làn xe sử dụng một bộ phận quang trọng để phát hiện vệt sơn đường và lề đường, cả hai được mô tả bằng những đường cong tuyến tính từng phần.
4. Theo dõi làn đường
Hệ thống xây dựng và duy trì đại diện của tuyến đường trong một bán kính cố định là 75 m. Vạch tâm đường của mỗi làn xe được mô phỏng như một đường cong tuyến tính từng phần, với các điểm điều khiển cách nhau khoảng 2m. Từng điểm điều khiển được đưa ra một giá trị vô hướng tin cậy để chắc chắn việc ước tính theo dõi làn đường tại thời điểm đó.
Vạch tâm đường được tạo ra, theo dõi làn đường kết hợp với ước tính vạch tâm đường. Nếu kết hợp thành công, các vạch tâm đường dự kiến được sử dụng để cập nhật các ước tính làn đường.
Khi một vạch tâm đường dự kiến được kết hợp với việc theo dõi làn đường, nó được sử dụng để cập nhật các ước tính làn đường để lập bản đồ các điểm kiểm soát, mỗi lần cập nhật, các giá trị tin cậy của các điểm kiểm soát tăng lên, nếu giá trị tin cậy của một điểm điều khiển giảm xuống dưới một ngưỡng thì vị trí đó được loại bỏ và được tính toán lại.