Giới thiệu trang bị và các cảm biến trên xe Junior
- Thứ hai - 07/03/2022 23:29
- In ra
- Đóng cửa sổ này
Đội đua Stanford đã giành được chiến thắng trong cuộc thi DARPA Grand Challenge năm 2005 cùng với chiếc xe Stanley (dựa trên chiếc xe nguyên mẫu Touareg của Volkswagen). Stanford đã mang đến cuộc thi thách thức đô thị UCE 2007 chiếc xe có tên là Junior, Junior được phát triển dựa trên nền tảng xe Passat Wagon Diesel của Volkswagen. Trong bài viết này tác giả giới thiệu trang bị và các cảm biến trên xe Junior.
1. Trang thiết bị trên xe
Tổng cộng trong quá trình phát triển, đội đua Stanford đã sử dụng ba chiếc xe, một chiếc đóng vai trò là chiếc xe đua chính, và hai chiếc còn lại được sử dụng để sao lưu, thử nghiệm và cho các mục đích phát triển.

Hình 1. Xe Junior của đội đua Stanford trên nền tảng xe Passat Wagon Diesel của Volkswagen
Một trong những chiếc xe đã được sửa đổi cho việc điều khiển bằng máy tính. Động cơ DC có mô men xoắn thấp được kết nối với trục tay lái bằng một dây đai cho phép xe tự dẫn hướng. Giao tiếp điện tử điều khiển trợ lực phanh, ga, hộp số, và tín hiệu lần lượt cho phép kiểm soát chặt chẽ tốc độ và hướng của xe. Giao tiếp bổ sung cung cấp các máy tính tích hợp với các dữ liệu trạng thái xe, chẳng hạn như góc lái và tốc độ từng bánh xe. Một bộ chuyển đổi không dây và nút dừng điện tử hiện đang được tích hợp.

Hình 2. Quá trình lắp ráp các thiết bị trên Junior
Chiếc xe được phát triển cũng có một hệ thống pin dự phòng, có thể được cắm vào một nguồn điện bên ngoài để giữ cho các máy tính vẫn chạy trong khi động cơ của chiếc xe ngừng hoạt động.
2. Hệ thống máy tính
Tất cả các máy tính điều khiển được gắn trong thân của chiếc xe. Hệ thống bao gồm hai máy tính với CPU đa nhân của Intel, và mô đun giao tiếp điều khiển các cảm biến khác nhau và các thiết bị truyền động. Tất cả các máy tính chạy hệ điều hành Redhat Linux - FC6.
3. Hệ thống cảm biến
Ø Bộ điều hướng Applanix POS LV 420. Junior sử dụng hệ thống điều hướng Applanix POS LV 420 để ước tính trạng thái chiếc xe (địa điểm, định hướng, vận tốc). Hệ thống POS LV 420 đi kèm với ba ăng ten GPS, gắn trên mui xe, cảm biến quán tính IMU được lắp trên cầu sau, và một bộ mã hóa bánh xe bên ngoài gắn liền với bánh xe phía sau, bên trái.
Ø Velodyne HD LIDAR.
Junior sử dụng máy đo khoảng cách laser Velodyne HD LIDAR .
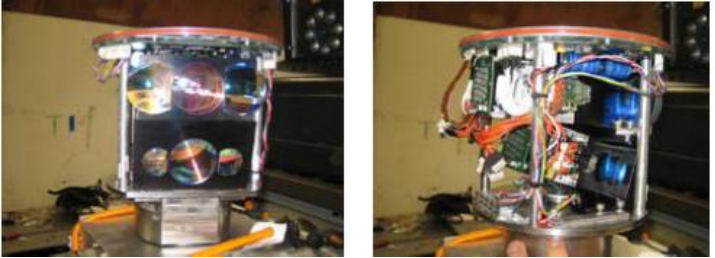
Hình 3. Velodyne HD LIDAR (đã được tháo vỏ)
Hình 4cho thấy phạm vi quét điển hình được thu lại bởi máy quét này. Các dữ liệu thu được đầy đủ cả 3 chiều.
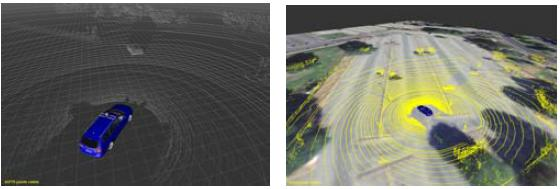
Hình 4. Phạm vi quét điển hình, được thu lại bởi Velodyne HD LIDAR
Ø IBEO Alasca XT.
Hai cảm biến IBEO Alasca XT cung cấp phạm vi cảm biến bổ sung được gắn trên cản trước của chiếc xe.

Hình 5. Cảm biến IBEO Alasca XT
Hình 6 cho thấy phạm vi quét điển hình của IBEO. Các dữ liệu IBEO thưa thớt hơn so với Velodyne HD LIDAR, nhưng bề mặt đất được lọc tự động, làm cho dữ liệu dễ dàng để xử lý hơn.
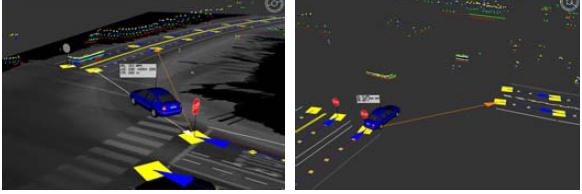
Hình 6. Phạm vi quét của IBEO
Ø Camera PointGray.
Junior sử dụng một camera đẳng hướng, sản xuất bởi PointGray. Camera này bao gồm sáu camera CMOS, kết nối với máy tính Junior thông qua một giao diện firewire. Hình 7 cho thấy ví dụ về một ảnh được chụp bởi nhiều camera.

Hình 7. Ảnh chụp bởi nhiều máy ảnh kết hợp
Các camera được hiệu chỉnh và hình ảnh được chiếu lên một mô hình dạng cầu, để cung cấp đầy đủ hình ảnh toàn cảnh và được chồng lên trên một bản đồ trên không của môi trường.
Khối cầu này, cung cấp một cái nhìn đầy đủ về mọi hướng của khu vực xung quanh chiếc xe, bao gồm cả mặt đường.

Hình 8. Hình ảnh được chiếu lên mô hình dạng cầu
Ø Radar.
Hệ thống sở hữu hai bộ cảm biến radar tầm xa được sản xuất bởi Bosch. Các cảm biến này cung cấp dữ liệu phạm vi bổ sung. Radar được sử dụng để phát hiện xe ở phạm vi mở rộng, và các loại xe được che khuất bởi các xe khác.
Ø SICK LD-LRS1000.
Hai laser SICK LD-LRS1000 sẽ được gắn trên hai góc sau của chiếc xe để đảm bảo phủ sóng hoàn toàn phía sau xe xe có thể đi lùi và đi qua các bài diễn tập.