Cảm biến mômen xoắn trên hệ thống lái trợ lực điện tử
- Thứ tư - 18/05/2022 15:42
- In ra
- Đóng cửa sổ này
1. Phân loại và yêu cầu
Một trong những cảm biến quan trọng nhất của hệ thống EPS là cảm biến mô-men xoắn trên trục lái. Nó được đo ở trục đầu vào của hệ thống lái. Dựa trên mômen lái đo được, bộ điều khiển hệ thống lái EPS xác định góc đánh lái và điều khiển động cơ EPS phù hợp.
https://pashagrand.com/Hệ thống lái EPS ảnh hưởng đến cảm giác lái nên giá trị được của mô men phải chính xác, đáp ứng độ phân giải cao và giá trị đo với độ tin cậy tuyệt đối. Giá trị đo bị sai lệch dẫn đến việc hệ thống điều khiển động cơ EPS không đúng và có thể mất kiểm soát hệ thống lái.
Các yêu cầu kỹ thuật quan trọng nhất đối với cảm biến mô-men xoắn của hệ thống EPS hiện đại được liệt kê như sau:
• Độ tin cậy cao nhất
• Phạm vi đo mô-men xoắn hoạt động khoảng. ± 10 Nm
• Độ phân giải tín hiệu cao và độ chính xác của phép đo.
• Xử lý tín hiệu với độ trễ ít
• tuổi thọ cao, không cần phải bảo dưỡng trong thời gian dài.
• Hệ thống có khả năng tự chẩn đoán, chống nhiễu với hộp ECU.
• Dải nhiệt độ −40 đến +850C cho các hệ thống lái (EPSc) và −40 đến +1250C cho các ứng dụng khoang động cơ.
• Chống bám bụi, rung động, mài mòn.
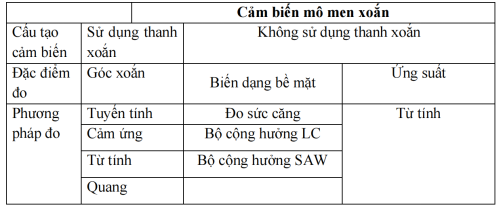
Cảm biến mô-men xoắn có thể được phân loại theo cấu tạo của chúng gồm: cảm biến có thanh xoắn và cảm biến không có thanh xoắn. Yêu cầu thanh xoắn của cảm biến chịu lực xoắn trên mỗi góc quay, cảm biến chuyển đổi giá trị đo mômen xoắn thành giá trị góc xoay. Độ cứng của thanh xoắn trong các hệ thống EPS hiện đại là từ 2 đến 2,5 Nm trên mỗi độ góc xoắn (2 –2,5 Nm/0 ). Độ xoắn cao nhất được giới hạn ±5˚ để bảo vệ thanh xoắn.
Bảng 1. Phân loại cảm biến mô men xoắn
2. Cảm biến mô men với thanh xoắn
2.1. Cảm biến mô men xoắn loại tuyến tính
Phương pháp đo mô men xoắn sử dụng loại tuyến tính được sử dụng trên hệ thống lái EPS đầu tiên. Tuy nhiên, cảm biến này chỉ được sử dụng cho các hệ thống giá rẻ trong phân khúc xe nhỏ. Nguyên nhân chính là giá trị đo có thể bị sai lệch do bị mài mòn hoặc không tiếp xúc, khả năng chịu tải cơ học hạn chế và nhạy cảm với bụi bẩn.
Nguyên lý đo dựa cấu tạo bởi con trượt và các cực điện. Trong đó, con trượt sẽ được điều chỉnh quay dọc theo chiều điện trở. Cảm biến mô-men xoắn trong hệ thống EPS sử dụng 2 con trượt và một số tiếp điểm trượt song song cho nguồn cấp tín hiệu ổn định hơn. Phương pháp đo tuyến tính phân tích tỷ lệ dễ dàng hơn và không phụ thuộc tuyệt đối vào giá trị điện trở và nhiễu nhiệt độ. Hơn nữa, Phương pháp đo mô men xoắn loại tuyến tính cung cấp giá trị điện áp cao, do đó không cần thêm bộ khuếch đại và xử lý tín hiệu.
2.2. Cảm biến mô men xoắn loại cảm ứng
Cảm biến mô men xoắn cảm ứng là một loại cảm biến từ trường, dựa trên hiện tượng cảm ứng điện từ. Ưu điểm chính của phương pháp do cảm ứng là cảm biến chịu được các tác động bên ngoài như bụi bẩn, dầu và nước. Cảm biến cảm ứng có thể hoạt động đáng tin cậy trong nhiều loại môi trường.
Khi người lái xe điều khiển vô lăng, mô men lái tác động lên trục sơ cấp của cảm biến mô men thông qua trục lái chính. Người ta bố trí các vòng phát hiện 1 và 2 trên trục sơ cấp (phía vô lăng) và vòng 3 trên trục thứ cấp (phía cơ cấu lái).
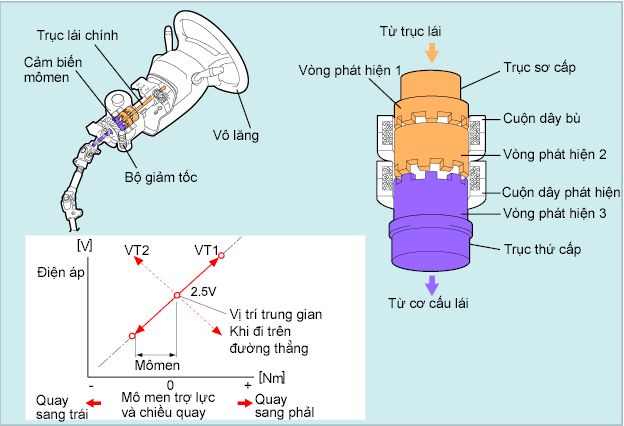
Hình 1. Cấu tạo cảm biến mô men xoắn cảm ứng trên ô tô
Trục sơ cấp và trục thứ cấp được nối bằng một thanh xoắn. Các vòng phát hiện có cuộn dây phát hiện kiểu không tiếp xúc trên vòng ngoài để hình thành một mạch kích thích. Khi tạo ra mô-men lái thanh xoắn bị xoắn tạo độ lệch pha giữa vòng phát hiện 2 và 3. Dựa trên độ lệch pha này, một tín hiệu tỷ lệ với mô men vào được đưa tới ECU. Dựa trên tín hiệu này, ECU tính toán mô men trợ lực cho tốc độ xe và dẫn động động cơ điện.
Hiện nay, một số hãng xe sử dụng cảm biến mô men xoắn cảm ứng loại 2 cuộn dây. cuộn dây phát, cuộn dây thu và rotor bao gồm một vật liệu dẫn điện.
Dòng điện xoay chiều trong cuộn dây phát tạo ra từ trường biến đổi. Rotor được bố trí đối diện nên xuất hiện dòng điện xoay chiều. Dòng điện trong rotor tạo ra trường điện từ khác gây ra điện áp trong cuộn dây thu. Hình dạng và vị trí đặc biệt của cuộn dây phát, rotor và cuộn dây thu làm cho khớp nối điện từ giữa cuộn dây phát và rotor không phụ thuộc vào vị trí của rotor, trong khi phản hồi từ rotor đến máy thu phụ thuộc vào vị trí của rotor. Điện áp cảm ứng trong các cuộn dây thu được so sánh với điện áp nguồn (phân tích tín hiệu tỷ lệ) xác định góc lái.
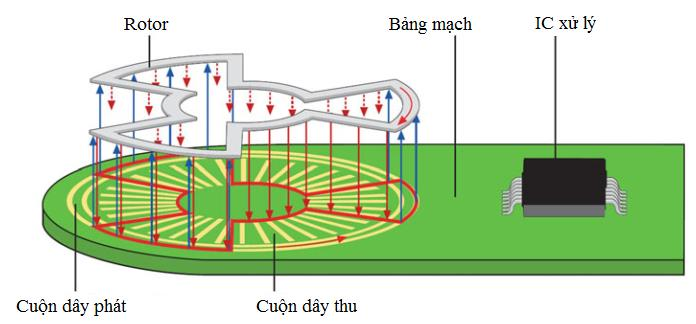
Hình 2. Cấu tạo cảm biến mô men xoắn cảm ứng loại 2 cuộn dây
2.3. Cảm biến mô men xoắn loại từ tính
Cảm biến mô men xoắn loại từ tính khác với cảm biến tuyến tính, cảm biến cảm ứng. Cảm biến từ tính sử dụng từ trường tĩnh được tạo ra bởi nam châm vĩnh cửu và đi qua một hoặc một số cảm biến phụ thuộc vào từ trường. Một số cảm biến nhận biết từ tính như: Cảm biến Hall và cảm biến MR được sử dụng xác định góc xoắn.
Số lượng nam châm vĩnh cửu phụ thuộc vào độ cứng của thanh xoắn trong các hệ thống EPS. Nếu thanh xoắn có độ góc xoắn (2 Nm/0 ) và dải đo ± 10 Nm cần có dải đo góc ± 5˚.
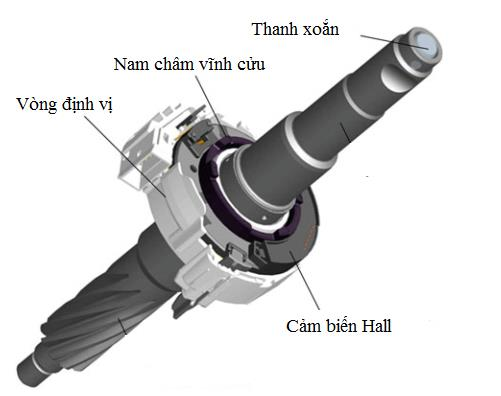
Hình 3. Cấu tạo cảm biến mô men xoắn loại từ tính
2.4. Cảm biến mô men xoắn loại quang
Cảm biến quang bao gồm một bộ phận phát sáng LED và một bộ phận thu quang. Đĩa cảm biến xẻ rãnh được gắn trên thanh xoắn. Độ phân giải tín hiệu phụ thuộc vào số rãnh trên đĩa cảm biến. Ánh sáng do đèn LED tạo ra được dẫn bởi một bộ dẫn sáng bằng sợi quang và hai tấm khung dẫn, được bố trí trên một thanh xoắn tới một mảng diode quang tích hợp. Khi thanh xoắn quay làm thay đổi vị trí đĩa cảm biến, bộ phận thu quang phát hiện ra vị trí thanh xoăn thông qua cường độ sáng LED. Các hãng ô tô thường chế tạo cảm biến mô men xoắn lọa quang với 2 bộ phận thu phát độc lập để đảm bảo an toàn.
Tuy nhiên, do các điều kiện rất khắc nghiệt và do độ nhạy với bụi bẩn và khả năng chịu tải cơ học hạn chế, các cảm biến này chỉ có thể được sử dụng trong một số trường hợp hạn chế.
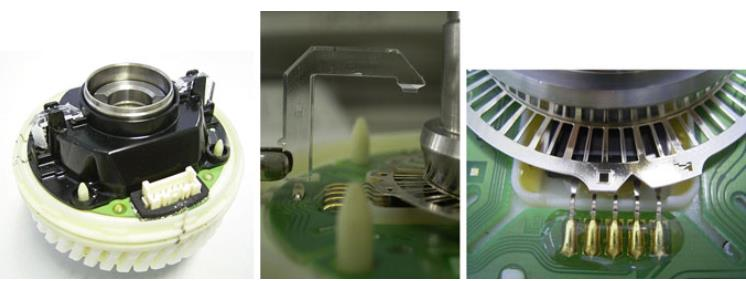
Hình 4. Cấu tạo cảm biến mô men xoắn loại quang
3. Cảm biến mô men xoắn không sử dụng thanh xoắn
Một yếu tố quan trọng để tạo cảm giác lái là độ cứng của bộ trợ lực, vành tay lái và các bánh xe dẫn hướng. Độ cứng quá thấp không tạo cảm giác lái chính xác, dẫn đến thường xuyên phải điều chỉnh lái. Độ cứng quá do tác động phản lực giữa các bánh xe và mặt đường dẫn đến điều chỉnh hướng ô tô khó khăn. Các hệ thống lái EPS hiện có xu hướng đạt độ cứng của thanh xoắn trên 2 Nm /0 . Nếu góc xoắn nhỏ dẫn đến việc đo mô men xoắn cần độ chính xác cao hơn. Phương pháp đo mô mem chống xoắn đạt hiệu quả cao hơn và có cấu tạo đơn giản.
Bộ đo mô men chống xoắn dựa trên biến dạng bề mặt của trục đo được gọi là sóng âm bề mặt (SAW). Nguyên lý đo dựa trên bộ cộng hưởng SAW. Bộ cộng hưởng bao gồm các điện cực kim loại mỏng phủ một lớp thạch anh đặt trên bề mặt trục lái. Ở hai đầu trục đặt bộ thu phát RF. Khi trục lái chịu tác động mô men xoắn làm biến dạng bề mặt trục và đế thạch anh của thiết bị SAW, do đó gây ra sự thay đổi tần số cộng hưởng của nó. Về cơ bản, SAW hoạt động như một máy đo biến dạng 'phụ thuộc vào tần số'. Tín hiệu tần số đo tần số cộng hưởng đo được sự sai lệch giữa tần số phát và tần số thu được. IC xử lý phân tích sự khác biệt về tần số cộng hưởng giữa hai thiết bị SAW, với xử lý và hiệu chuẩn điện tử, cho biết chính xác mô-men xoắn được truyền bởi trục.
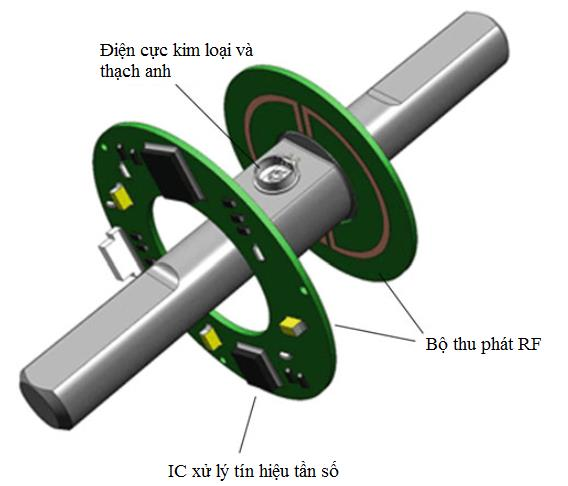
Hình 5. Cấu tạo cảm biến mô men xoắn không sử dụng thanh xoắn